Unified Sensor Data Platform Enhances 3D Perception for Autonomous Vehicles and Robotics

Invented by Yuan; Feng, Purandare; Kaustubh, Kizhakkemadam Sreekumar; Unnikrishnan
In this article, we explore a patent application that changes how smart machines see and understand the world. We’ll walk you through why this matters, how it builds on older ideas, and what makes this invention stand out. Whether you are a tech enthusiast, an engineer, or just curious about AI, you’ll find clear answers, practical context, and a deep dive into the future of sensor fusion and machine perception.
Background and Market Context
Big changes are happening in fields like robotics, autonomous vehicles, and smart devices. As these machines get smarter, they need to see and interpret the world better. Imagine a self-driving car: it must not only see what’s in front, but also understand depth, motion, and hidden objects. To do this well, it uses different kinds of sensors—like cameras, LiDAR, and radar. Each of these sensors “sees” the world in its own way.
Earlier, most systems used just one type of sensor—maybe only a camera, or maybe just radar. But this approach misses a lot. For example, cameras can see colors and signs, but they struggle in fog or at night. LiDAR gives detailed 3D shapes, but it can’t read a stop sign. Radar works in bad weather, but doesn’t show colors or fine details. By combining them, machines can get a much richer picture. This is called multi-modal perception.
But mixing all this data is hard. Each sensor talks in its own “language,” has its own timing, and produces data in different formats. To make sense of it all, the system must carefully synchronize and merge the information. This is called sensor fusion. If done well, it makes machines safer and more reliable. For example, in self-driving cars, better perception means fewer mistakes and accidents.
Industries from transportation to security, from manufacturing to entertainment, are eager for these advances. Robots in warehouses, drones in the sky, and even smart home devices all benefit from better ways to understand the world. With the rise of generative AI, digital twins, and mixed reality, the need for high-quality, real-time sensor fusion is greater than ever.
Yet, companies still face big challenges. Building these systems often means lots of custom code, fragile connections, and manual tweaks. This slows down innovation and makes it hard to adapt or scale. What if you could build flexible, powerful sensor fusion pipelines without writing code each time? What if you could plug in new sensors, update AI models, or switch between cloud and device processing with just a few changes in a config file? That’s what this patent application aims to solve.
Scientific Rationale and Prior Art
To understand what’s new here, let’s look at how things have been done before. The idea of sensor fusion is not new. For decades, engineers have tried to combine data from cameras, radar, and other sources. Early systems, like basic driver-assist in cars, might simply overlay radar data on a camera image. But this was often clumsy and error-prone.
The main problems were synchronization, alignment, and data structure. Sensors run at different speeds—one might send data 30 times per second, another only 10. Their clocks might not match. Also, they produce different types of data: images, point clouds, or numbers. To merge them, you need to line them up in time (synchronization), match their physical positions (alignment), and convert their outputs into a shared format.
Most older systems handled this with lots of hand-written code. Developers would stitch together different frameworks, convert between data formats, and manually manage timing issues. This made systems fragile and hard to maintain. Any change—adding a new sensor, updating a model, or moving to a new environment—could require rewriting large parts of the code.
Some frameworks tried to automate parts of this. For example, ROS (Robot Operating System) offers tools for handling messages from different sensors, but it still leaves much up to the user. GStreamer and FFmpeg help with multimedia pipelines, but are focused on audio and video, not sensor fusion. Other solutions, like NVIDIA’s Triton Inference Server or PyTorch/ONNX/TensorFlow models, help with AI, but don’t manage the full pipeline from data capture to rendering.
More recent research has explored “late fusion” and “early fusion” strategies. In late fusion, each sensor’s data is processed separately and only combined at the end. In early fusion, raw data is merged first, then sent to a model. Each has strengths and weaknesses. But few systems allow you to easily switch between these modes, or to update the pipeline structure without changing code.
The key scientific hurdles are:
- How to synchronize data streams with different rates and time stamps.
- How to align data from sensors in different physical positions.
- How to process and merge data in a way that is flexible and scalable.
- How to let users build, change, or scale pipelines without rewriting code.
- How to support new AI models, cloud or edge processing, and real-time rendering.

This patent application builds on all these ideas, but introduces a new kind of framework that connects the dots. It proposes a system where you can assemble pipelines from modular parts, define the setup in a simple configuration file, and support dynamic changes—without messy rewrites. Under the hood, it uses clever data structures (like HashMaps), smart synchronization and alignment, remote API calls for inference, and flexible rendering for both 2D and 3D outputs.
Invention Description and Key Innovations
At the heart of this patent is a computer-implemented method and system for creating and managing a multi-modal perception pipeline. Let’s break this down in simple terms:
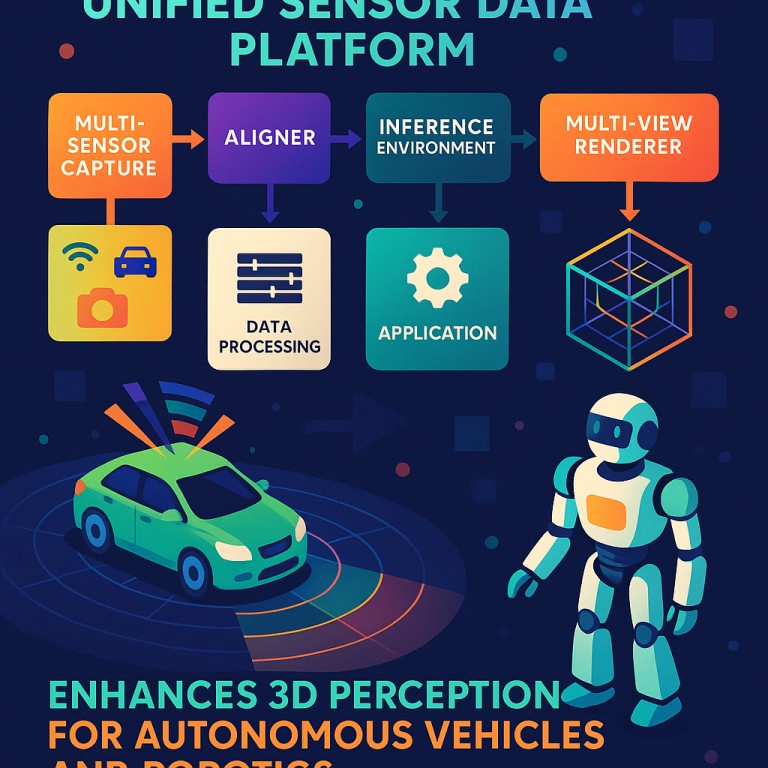
The invention lets you build a pipeline out of smaller building blocks, called components. Each component does a specific job—like reading sensor data, synchronizing it, running AI models, or rendering the output. Instead of writing new code for each setup, you just describe your pipeline in a configuration file. The system reads this file and connects the pieces for you.
Here are the main steps that happen in the pipeline:
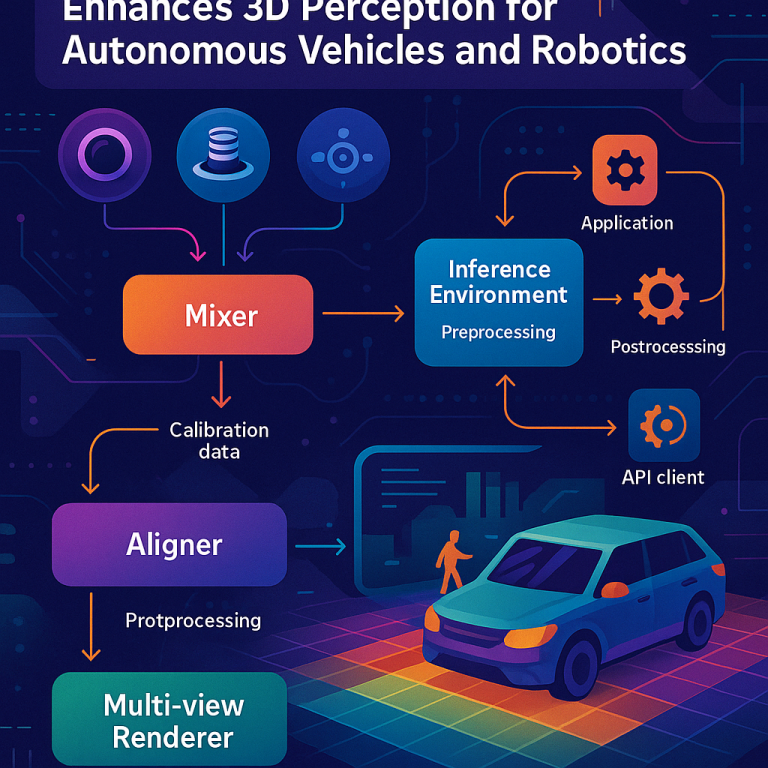
- Pipeline Assembly: The system uses configuration data (like a YAML or JSON file) to figure out which components to use and how to connect them. This means you can change the sensors, models, or outputs just by editing the config file.
- Synchronization: A special component (the mixer) reads data from different sensors (like a camera and a LiDAR), lines up their time stamps, and combines the data into a single, synchronized frame. If one sensor is faster or slower, the mixer can drop or interpolate frames to keep things smooth.
- Alignment: Another component (the aligner) takes the synchronized data and uses calibration information to match up the physical positions. For example, it knows where the camera and LiDAR are on the car, so it can map points from one to the other.
- Inference: The AI step happens here. The system can use one or more inference models—these could be classic machine learning models or deep neural networks. The models can run locally, on the cloud, or on edge devices. The pipeline talks to them via an API, so you can swap models or change where they run without changing the rest of the system.
- Rendering: The last part is making sense of the results. The renderer creates images or 3D views that show what the system “sees.” For example, it can overlay 3D bounding boxes (from LiDAR) onto camera images, or show a top-down map with detected objects.
Each component follows a standard interface, making it easy to plug in new parts. For example:
- The bridge converts raw data into a shared format.
- The mixer handles time alignment and merging.
- The aligner manages spatial calibration.
- The inference environment runs AI models and handles pre- and post-processing.
- The renderer produces visual outputs, supporting multiple views and overlays.
Key innovations include:
1. Graph-Based Configurations: Instead of writing code, users can describe their pipeline structure in a file. The system reads this file and builds the pipeline dynamically.
2. Modular, Plugin-Based Design: Each piece of the pipeline is a module that can be swapped, updated, or moved. You can add a new sensor or model just by updating the config.
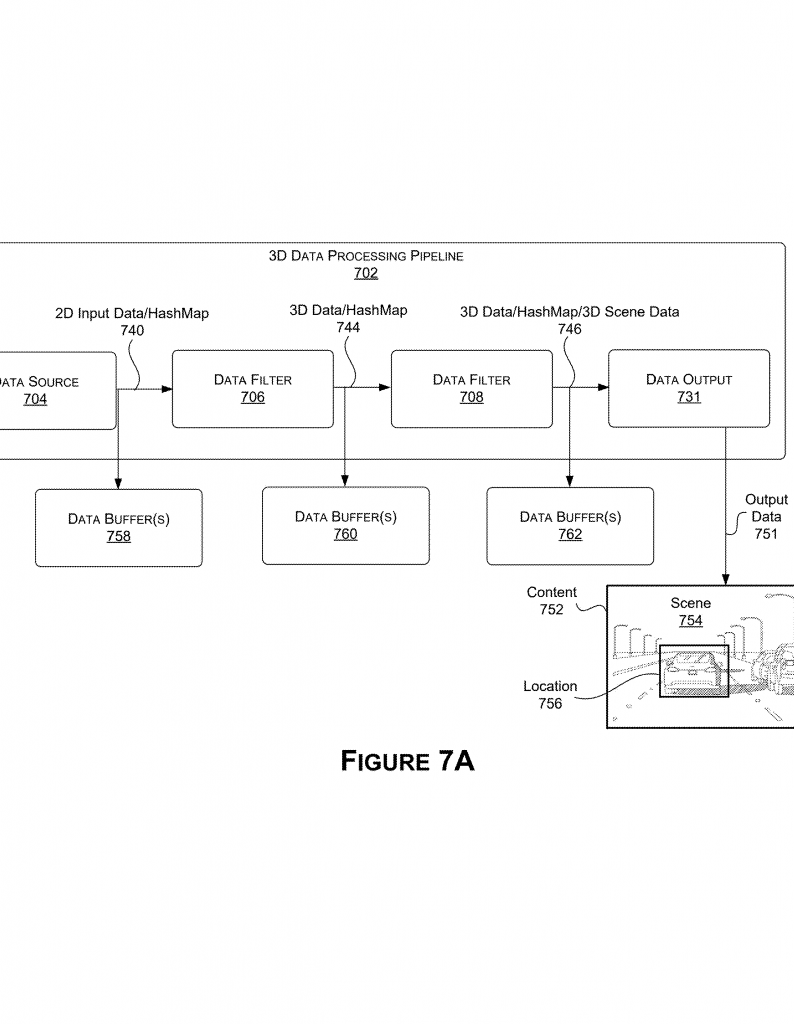
3. Unified Data Structures: Data from all sensors is converted into a HashMap format (key-value pairs), making it easy to merge, process, and pass between steps.
4. Flexible Synchronization Policies: The mixer can use different rules to handle sensors that run at different speeds, including dropping, interpolating, or smoothing frames.
5. Cloud and Edge Support: Inference models can run on local hardware, in containers, or in the cloud. The system uses APIs to talk to them, so location and scaling are flexible.
6. Multi-View Rendering: The renderer can show multiple views (like camera images, LiDAR top view, front view, etc.) at once. 3D shapes can be overlaid on both 2D and 3D outputs.
7. Dynamic Reconfiguration: The pipeline can be changed on the fly—switching sensors, models, or processing steps—by updating the configuration file. No need to stop the system or write new code.
Let’s look at a real-world example:
Imagine a self-driving car with six cameras and a LiDAR sensor. The system reads data from all these inputs. The mixer collects the latest frames, lines them up in time, and creates a shared frame. The aligner uses calibration info to match up the camera and LiDAR views. The AI model (maybe a fusion model like BEVFusion) takes this data and predicts where objects are in 3D space. The renderer creates a view that shows each camera’s image, with 3D bounding boxes drawn in, and also creates top-down and front-facing LiDAR views. All of this is managed by a pipeline described in a simple YAML file.
If the car manufacturer wants to add a new radar sensor, they just update the config file and add a radar module. If they want to try a new AI model running in the cloud, they set the model’s API endpoint in the config. If they want to change the output views, they change the renderer settings. No code changes needed.
The patent also covers many technical details—like how to handle memory efficiently, how to support different machine learning frameworks (PyTorch, ONNX, TensorFlow, etc.), how to use shared buffers for fast local processing, and how to support real-time requirements. It also supports simulation, digital twin, and synthetic data use cases—so the same pipeline can be used for training, testing, or production.
Because the system is modular and API-driven, it works in many settings: autonomous vehicles, robots, drones, security cameras, AR/VR systems, smart kiosks, gaming, and more. It can run on embedded devices, in data centers, or in the cloud. It even supports collaborative content creation and light transport simulation for 3D assets.
Overall, this invention gives companies and developers a powerful new way to build, scale, and update multi-modal perception systems. It makes sensor fusion faster, more reliable, and much easier to manage, opening the door to safer machines and smarter AI everywhere.
Conclusion
As machines get smarter, the need to see the world in clear, rich, and reliable ways only grows. This patent application lays out a blueprint for doing just that—by making it easy to combine many types of sensors, switch in new AI models, and adapt to new challenges with just a config file. Its modular, API-driven design cuts through old barriers, letting teams build and change perception systems without slowing down.
Whether you work in autonomous vehicles, robotics, smart devices, or immersive computing, the ideas here make sensor fusion more accessible and powerful. They reduce risk, save time, and make it possible to keep up with rapid advances in AI and hardware. With this framework, the future of machine perception—safe, flexible, and endlessly upgradable—is closer than ever.
Click here https://ppubs.uspto.gov/pubwebapp/ and search 20250336151.

