Simplifying Satellite Docking: Precision Navigation System Enhances Spacecraft Rendezvous and Safety

Invented by Ross; Graham, Kay; Robert L., K2R2 LLC
Satellites and spacecraft play a huge role in our lives, from beaming down television signals to enabling GPS navigation. But when it comes time for a spacecraft to approach and interact with a satellite—like for repairs, upgrades, or refueling—knowing exactly where that satellite is and how it’s oriented becomes a big challenge. A new patent application tackles this tricky problem in a fresh way. Let’s take a close look at the thinking behind this invention, the current state of the art, and what makes this new system stand out.
Background and Market Context
Imagine a world where satellites could be kept alive for much longer, fixed when they break, or even upgraded in space. This is not just science fiction—it is quickly becoming a need as we build more and more machines in orbit. In the past, satellites were launched, used, and then left to drift as space junk when something went wrong or they ran out of fuel. Today, companies and space agencies want to change that. They are working on ways to send up vehicles—robotic arms, drones, or even other satellites—that can approach, dock with, repair, or refuel these valuable machines.
But space is not like a factory floor. There is no “up” or “down.” Everything floats. Satellites spin, move, and can be in almost any orientation. When a repair robot or a servicing spacecraft gets close, it needs to know exactly where the satellite is and how it’s turned—down to the tiniest detail. Even a small mistake can ruin a mission, cause a collision, or damage expensive equipment.
The need for this kind of precision is driving rapid growth in the space servicing market. Private companies are developing “space tow trucks” to refuel satellites. Governments are planning missions to remove debris. New satellite designs even include special “docking ports” for future maintenance. To make all this work, we need safe, reliable, and automatic ways for vehicles to find and match up with satellites in three dimensions.
Right now, the market is crowded with solutions that try to solve this problem. Some use GPS, but that only gives a rough location, not orientation. Others use cameras and complicated image processing to spot special shapes or markers on the satellite. Some rely on lasers or radar. Each method has its own costs, limits, and risks.
So, the search is on for better, simpler, and more reliable ways to figure out a satellite’s exact position and orientation as another vehicle comes in for a close encounter. This is where the new patent application makes its mark, promising a system that is both smart and flexible for the needs of modern space missions.
Scientific Rationale and Prior Art
Solving the problem of knowing where something is in space is much harder than it sounds. On Earth, we often just look and see. But up in orbit, things are different. The lack of gravity, the ever-changing lighting, and the fact that both vehicles might be moving make old tricks unreliable.
Let’s look at how people have tried to solve this before. The most basic way is called triangulation. With triangulation, you look at an object from two different spots, measure the angles, and use math to figure out where it is. This works if you know exactly where your cameras are and can clearly see the object.
Some systems use two cameras placed a certain distance apart, like your eyes. They take pictures at the same time. By seeing where an object shows up in both images, the system can figure out how far away it is and where it sits in 3D space. This is often called “stereo vision.” It’s used in things like robot arms in factories, where the environment is controlled and nothing moves unless the robot moves it.
But space is wild. Satellites can tumble or drift. The lighting can be harsh or almost non-existent. Cameras can be blinded by sunlight, or lose track of their target if something blocks their view.
Another trick is to use “fiducials.” Think of fiducials as special markers placed on the object you want to find—like stickers or little lights. If your camera can spot these fiducials, it can figure out where the object is and how it’s turned. This is used in lots of fields, from surgery to virtual reality. Some prior art even uses “active fiducials” that light up, blink, or change in some way to make them easy to spot.
A common problem with all these methods is calibration. In a factory, you can carefully measure and set up your cameras and robots. But in space, things shift. Vibrations, temperature changes, and even tiny impacts can throw off your setup. If you have to recalibrate every time the satellite or the robot moves, you lose time and money. Worse, you risk making mistakes if the system is not smart enough to adjust on its own.
Some older patents have tried to solve these issues by using feedback loops: the system watches the fiducials, moves the robot arm, checks again, and keeps adjusting until it’s in the right place. These feedback systems help, but they still often need lots of setup and can be confused if the markers are blocked or the environment changes.
Past systems also tend to use simple “on/off” markers—either a light is on or off. But if there are many markers, it can be hard to tell which is which. Some solutions use different colors or blinking patterns to help the system tell them apart, but this adds cost and complexity.
In summary, the world of prior art gives us a toolkit: stereo cameras, fiducials, feedback loops, and some clever tricks with light. But there are still big gaps—especially in making these systems fast, robust, and easy to set up in the unpredictable world of space. The new patent application takes these ideas and moves them forward in some clever ways.
Invention Description and Key Innovations
The patent application we’re exploring introduces a system that aims to solve these challenges head-on. Let’s break down how it works, using simple ideas and words.
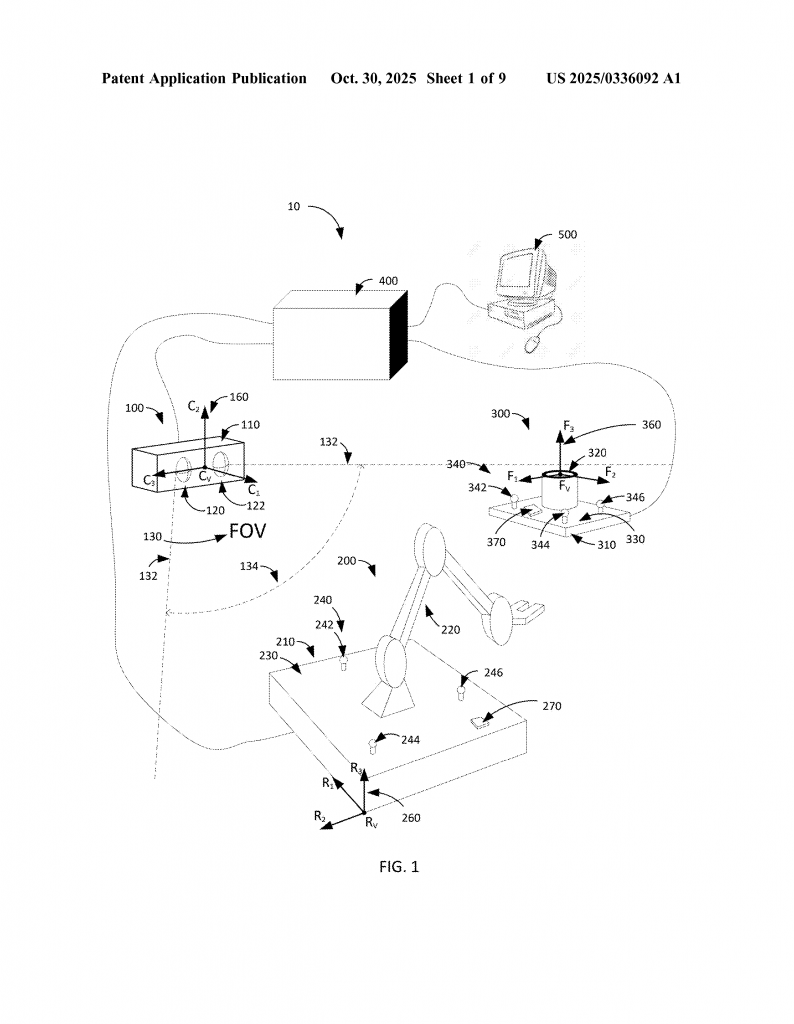
At the heart of the invention are three things: special markers placed on the satellite, a sensor (like a camera or light detector) on the approaching vehicle, and a smart brain (processor and memory) that puts all the information together.
Here’s how the system works step by step:
First, before launch, the satellite is fitted with a bunch of target items—these are the fiducials. They are put at known spots all over the satellite. Some of these fiducials are special: they can be turned on or off, or change how much light they give off. This means that, from far away, the approaching vehicle can “ask” the satellite to turn on certain markers and leave others off. This makes it much easier for the sensor to tell which marker is which.
Second, the vehicle that is going to approach the satellite has a sensor, like a camera. This camera is designed to pick up the light from the fiducials. It can see where the markers show up in its view, and measure their positions in two dimensions (left-right and up-down).
Third, the vehicle’s computer already knows where each fiducial is supposed to be on the satellite. When it sees them in its camera, it uses smart math to figure out where the satellite must be in space, and how it is turned. This is called figuring out the “position and orientation.” In simple terms, the system can say, “The satellite is 10 meters in front of me, tilted 5 degrees to the left, and spun 3 degrees around its center.”
Now, here’s where the invention gets clever. By making at least one of the markers able to be put in different states (for example, making it brighter or dimmer, or turning it on and off), the system avoids confusion. It can single out each marker, making sure it knows exactly which one it’s looking at. This is super helpful if some markers get blocked, or if there are other bright lights in the background.
The patent even includes ways to filter out unwanted light. If the satellite is passing in front of the sun, or there’s a bright star nearby, the system can use specialized sensors and filters to only see the light from its own fiducials. Some markers can also blink or modulate their brightness at a special frequency, so the sensor knows to ignore anything that doesn’t match.
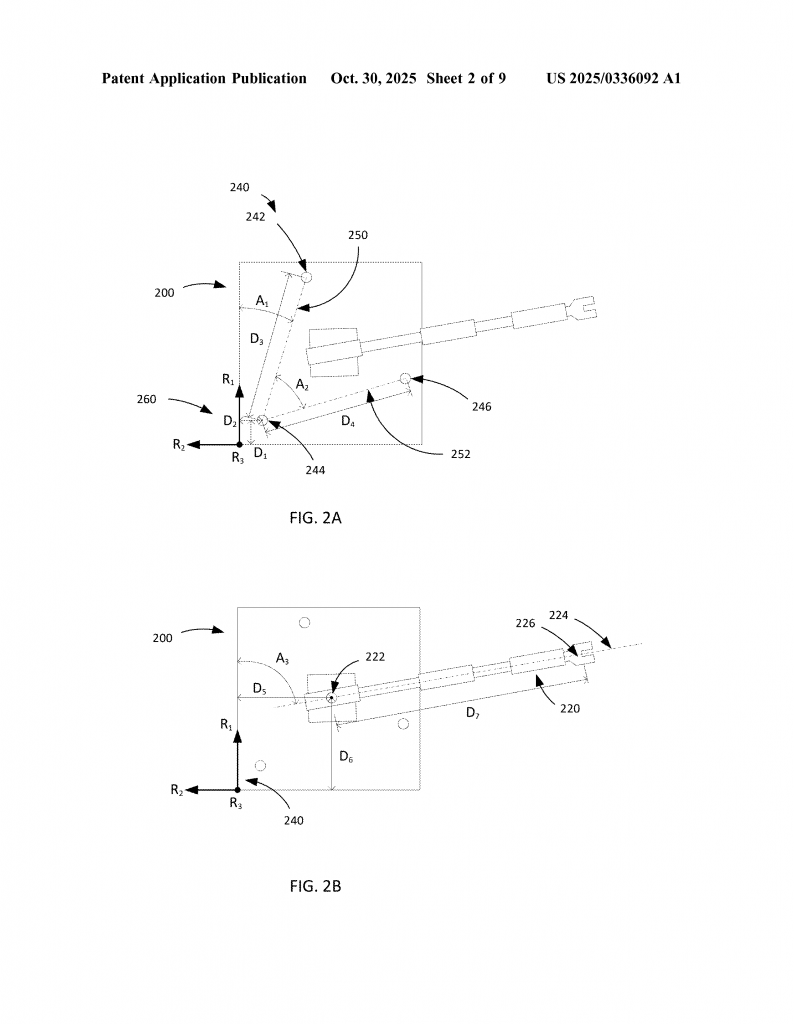
The invention also covers what happens next. Once the vehicle knows where the satellite is and how it’s turned, it can move a robotic arm or an end effector (like a special hand) to the right spot. The arm itself can have sensors and memory that keep track of where it is, down to each moving part. The system can then guide the hand to latch onto a special coupler on the satellite, or perform whatever job is needed—like refueling or swapping out parts.
Because every piece—from the target items, to the camera, to the robotic arm—has its own memory, the whole system can reconfigure itself if anything shifts. If the satellite or the robot moves, the system just checks the fiducials again, recalculates, and carries on. This makes it much more robust, with much less time lost to calibration.
Let’s highlight some key innovations:
– The use of selectable, state-changing fiducials that can emit different amounts of light.
– A sensor on the vehicle that is tuned to the exact kind of light the markers produce, making it easy to tell signal from noise.
– Smart software that knows where every marker should be, and can quickly match what it sees to what it expects.
– The ability to track both position (where the satellite is) and orientation (how it’s turned) in real time, even if some markers are blocked or the lighting changes.
– Memory and processing distributed across all parts, so the system can adjust if anything moves or changes.
The patent also covers special cases, like when a robotic arm must reach out and grab a coupler on the satellite. The system can keep track of the position and orientation of both the arm and the coupler, making sure the approach is safe and accurate.
Beyond space, the application describes how these same ideas can work in other settings—like factories, warehouses, or even at sea—where robots need to find and interact with objects whose positions may change.
All together, this invention makes it much easier and safer for vehicles to approach, dock with, and service satellites or other objects in tricky, changing environments. It opens the door to more flexible, longer-lasting, and lower-cost space operations.
Conclusion
As we send more machines into space and dream bigger about what they can do, the need for smart, reliable, and automatic systems to find and interact with satellites is only growing. This new patent application brings together the best ideas from years of research—like stereo cameras, active fiducials, and smart software—and adds clever new twists, like selectable light markers and self-adjusting systems with distributed memory.
By making it easier to figure out exactly where a satellite is and how it’s turned—no matter what challenges pop up—this invention paves the way for safer, more flexible, and more ambitious missions in space and beyond. As the market for satellite servicing, repair, and refueling continues to grow, systems like this will be at the heart of keeping our orbits safe, clean, and full of life.
Click here https://ppubs.uspto.gov/pubwebapp/ and search 20250336092.

