Seamless Map Updates Enhance Reliability of Autonomous Vehicles and Robotics Systems
Invented by Collins; Galen, Orendovici; Razvan
Keeping maps up to date is very important for safe navigation, especially for self-driving cars and robots. This new patent application explains a better way to update and share maps, so machines can keep moving safely even when the world around them changes. In this article, we will break down the problem, explain what has been done before, and show how this invention offers a smarter solution.
Background and Market Context
Let’s start by looking at why smart map updating matters so much today. Self-driving cars, delivery robots, drones, and even some virtual and augmented reality systems all use digital maps to move through the world. These maps are not like the ones you fold up in your glove box. Instead, they are very detailed, often in 3D, and show things like roads, lanes, signs, and even temporary changes like construction zones or parked vehicles.
The world never stands still. Roads get repaired. New signs go up. Construction blocks a lane. When something changes, the map needs to change too. If the map is old, a self-driving car might make a mistake or even stop working. That’s dangerous and annoying.
But updating maps for hundreds or thousands of machines at the same time is hard. If you just swap out the old map for a new one, some cars may still be using the old version while others have the new one. If the two versions don’t “fit together” at the edges, you could have big problems—like a car driving into a spot that the map says is empty, but really is not.
In the past, the only way to avoid these problems was to wait until all the changes could be made together, then release a big “batch” update. Sometimes, all the cars would need to stop to get the latest map. That can lead to delays, confusion, or even “disengagements,” which means the car has to give up and ask a human for help. In busy cities or on long delivery routes, this is a real problem.
The market for autonomous navigation keeps growing. From robotaxis to warehouse robots and delivery drones, more machines need up-to-date, safe, and smart maps. The ability to update maps quickly, safely, and without stopping the flow of traffic or work is a huge competitive advantage. That’s why this patent is so important—it promises a way to safely update maps, even while machines are already using older versions, without making them stop or get confused.
Scientific Rationale and Prior Art
To understand the invention, let’s look at how map updates worked before and what made things tricky.
Older systems treated the map as one big chunk. When something changed, the whole map (or a big part of it) had to be updated at once. This was called batch updating. Before any new map could be used, every single change had to be finished and checked. Only then could the new version be sent out. If a machine was using the old version, it had to stop and switch to the new one. This was slow and risky.
Another problem was “compatibility” at the edges. Imagine two self-driving cars driving next to each other, each using a different map version for their part of the city. If the border between the two regions does not line up, one car might think there’s a road where the other car sees a wall. This kind of mismatch can cause accidents or make vehicles stop suddenly.
Some systems tried to fix this by forcing all machines to switch maps at the same time, but that’s not always possible. Machines might be in the middle of a trip, or even offline when the update happens. Others tried to keep track of which car had which map, but this became complicated as the number of versions and vehicles grew.
Researchers and engineers also tried to use “compatibility data.” This means keeping a record of which map versions work together safely. But until now, these systems often stored this data in a way that was hard to update quickly. If you needed to change the compatibility info, it could take a long time to update all the records, and in the meantime, machines could end up with bad information.
In short, older systems were slow, risky, and not flexible enough for the real world. They could not handle quick changes, lots of machines, or the messy overlap between different map versions. As a result, self-driving cars and robots could get stuck, make mistakes, or need a human to step in.
Invention Description and Key Innovations
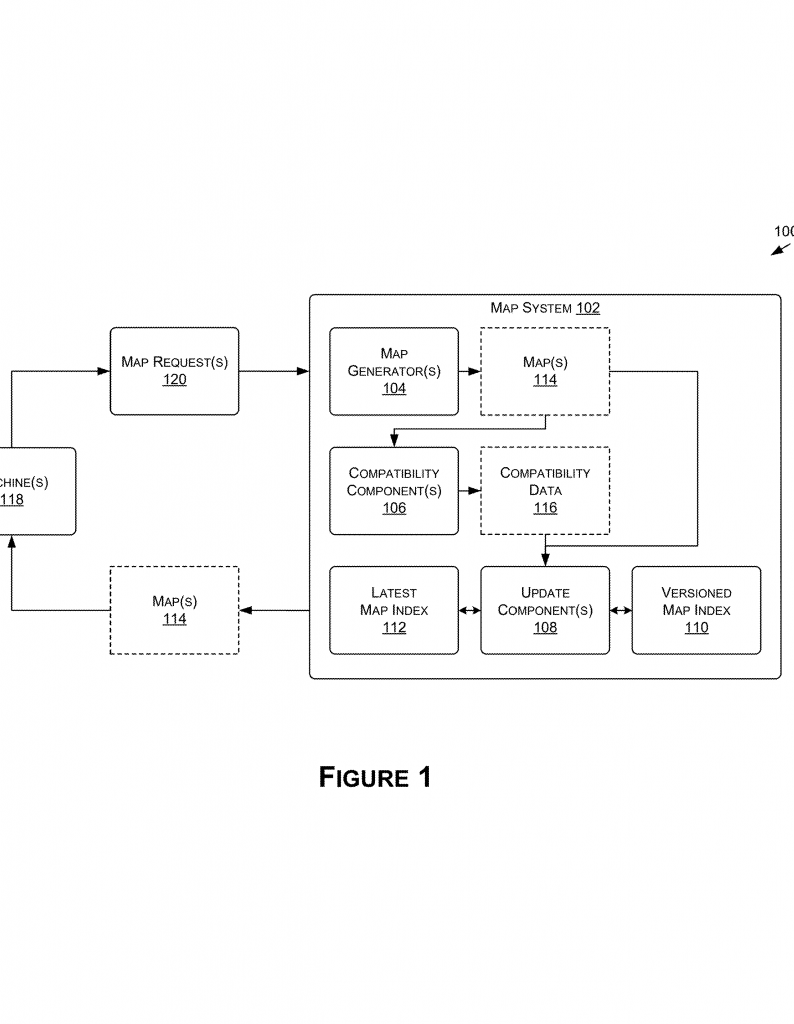
The patent introduces a new way to update and manage digital maps for machines, focusing on safety, speed, and flexibility. Here’s how it works in simple terms.
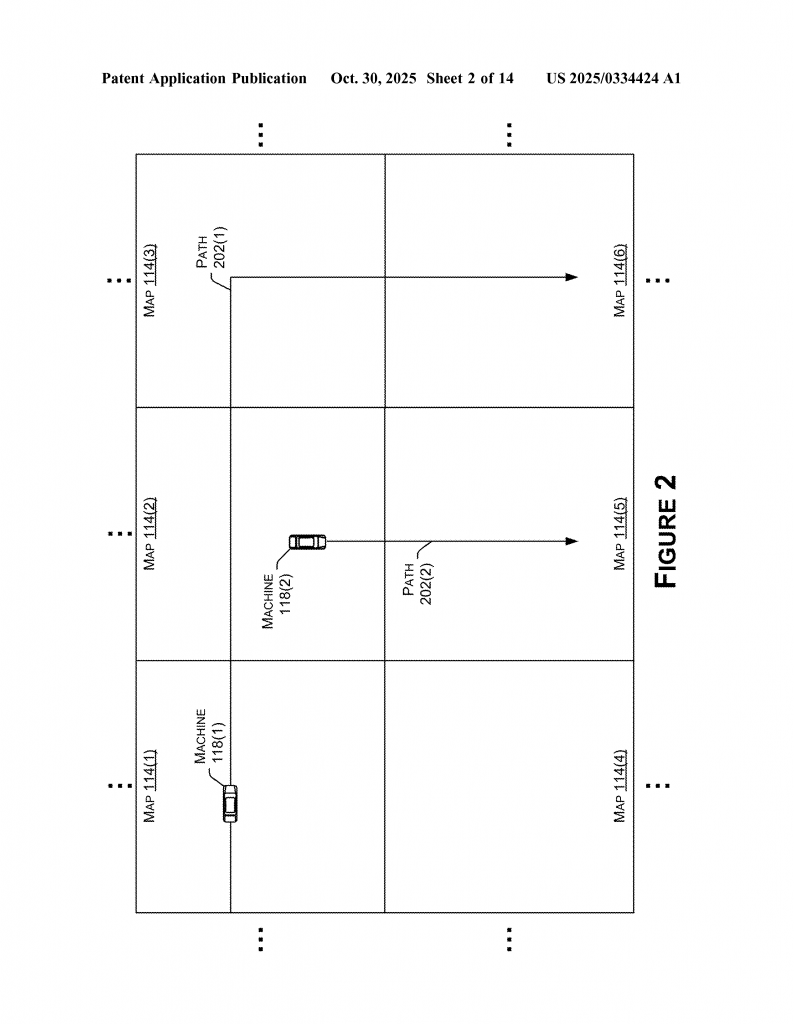
First, the map is split into pieces—think of a city divided into blocks, each with its own mini-map. Each piece can have several versions. When a change happens in one area (like a new detour or a road closure), only that piece needs to be updated, not the whole map.
Now, the smart part: every time a new map piece is created, the system checks and saves “compatibility data.” This is like a note saying, “This new piece works safely with these other pieces (and their versions).” The compatibility data can be simple—like a list—or more advanced, like a matrix showing which versions fit together at the edges.
When a new piece is ready, the system does not rush to replace the old one everywhere. Instead, it adds the new version to a “versioned index,” which is a record of all map pieces and their versions, along with their compatibility notes. Machines can keep using the old version until it’s safe to switch.
Then, the system quietly updates the compatibility data for the neighboring pieces. For example, if a road in Block A is now closed, but Block B is unchanged, the compatibility info is updated so machines know which combinations are safe. Only after all the compatibility notes have been checked and updated does the system mark the new piece as the “latest” in a separate “latest index.”
What’s clever is that this update process can happen at different times. This means some machines can keep using the old version, while others switch to the new one, all without getting confused at the borders. The compatibility data acts as a safety net, making sure that every combination in use is safe for navigation.
If a car or robot asks for map data, the system checks the compatibility info and gives it the right combination—old, new, or a mix—so everything matches up. Machines can even keep using their current map until their journey is done, then get the latest update during a safe moment.
The patent also covers many types of machines, not just cars. It works for robots in factories, drones, delivery bots, and even systems that use maps for things like virtual reality or simulation. The same smart update system can be used in the cloud, on edge devices, or in big data centers.
Another strong point is the flexible data format. Using matrices or similar structures, the system can handle simple flat maps, but also more complicated 3D environments (for example, in multi-level buildings or airspace for drones). The compatibility data can say not just “which version goes with which,” but also cover things like altitude or special regions.
All of this is handled by smart software and, in some cases, dedicated hardware. The system can use data from the machines themselves (like sensor readings and trip logs) to trigger updates when needed. It can track who is using what version, decide when it’s safe to switch, and keep everything running smoothly.
In short, the invention brings:
- Safe, step-by-step map updates, so machines don’t have to stop or risk mistakes.
- Flexible handling of many map versions and regions at once.
- Smart compatibility tracking, so edges always line up and machines can mix old and new safely.
- Support for many types of machines and uses, from cars to robots to virtual worlds.
- Efficient behind-the-scenes work, so users and machines hardly notice the updates.
Conclusion
This patent offers a real breakthrough for the world of autonomous machines and smart navigation. By breaking maps into smaller pieces, tracking which versions work together, and updating everything in a careful, step-by-step way, it solves many of the hardest problems of map updating. Machines can keep working, even as the world changes, without risking safety or needing human help. For companies and users, this means smoother rides, safer robots, and less downtime. For the whole industry, it points the way to a future where digital maps can keep up with the fast pace of the real world.
If you work with smart machines, or build systems that need to stay up to date in real time, this patent is worth studying closely. Its ideas about compatibility, versioning, and smart updates are sure to influence the next generation of autonomous technology.
Click here https://ppubs.uspto.gov/pubwebapp/ and search 20250334424.

