Invention for Vehicle navigation using object data from other vehicles
Invented by Gil Golov, Micron Technology Inc
One of the key drivers behind the growth of this market is the increasing number of connected vehicles on the road. With the rise of the Internet of Things (IoT), vehicles are becoming more interconnected, enabling them to exchange data seamlessly. This connectivity opens up a world of possibilities for vehicle navigation, as cars can now rely on the information gathered by other vehicles to make more informed decisions on the road.
The use of object data from other vehicles in navigation systems offers several benefits. Firstly, it allows for real-time updates on road conditions. For example, if a vehicle encounters heavy traffic or an accident, it can transmit this information to nearby vehicles, enabling them to reroute and avoid the congestion. This not only saves time for individual drivers but also helps to alleviate traffic congestion on a larger scale.
Additionally, object data from other vehicles can provide valuable insights into potential hazards. For instance, if a vehicle detects icy road conditions or a pothole, it can alert nearby vehicles, allowing them to adjust their driving accordingly. This proactive approach to navigation can significantly enhance safety on the roads, reducing the risk of accidents and improving overall driving experience.
Furthermore, the market for vehicle navigation using object data from other vehicles is also driven by the increasing demand for autonomous vehicles. As self-driving cars become more prevalent, they rely heavily on object data to navigate and make informed decisions. By leveraging the information gathered by other vehicles, autonomous vehicles can navigate more effectively, ensuring a smooth and safe journey for passengers.
The market for vehicle navigation using object data from other vehicles is not without its challenges. One of the main obstacles is the need for standardized communication protocols between vehicles. For this technology to reach its full potential, all vehicles must be able to communicate with each other, regardless of their make or model. Establishing industry-wide standards will be crucial in ensuring seamless communication and widespread adoption of this technology.
Privacy and security concerns also pose challenges for this market. As vehicles exchange data with each other, there is a need to protect sensitive information and prevent unauthorized access. Robust security measures and privacy regulations will be essential to build trust among consumers and ensure the responsible use of object data.
Despite these challenges, the market for vehicle navigation using object data from other vehicles holds immense potential. As technology continues to evolve, this innovative approach to navigation will revolutionize the way we travel, making our roads safer, more efficient, and less congested. With the increasing adoption of connected vehicles and the rise of autonomous driving, the demand for this technology is only set to grow in the coming years.

The Micron Technology Inc invention works as follows
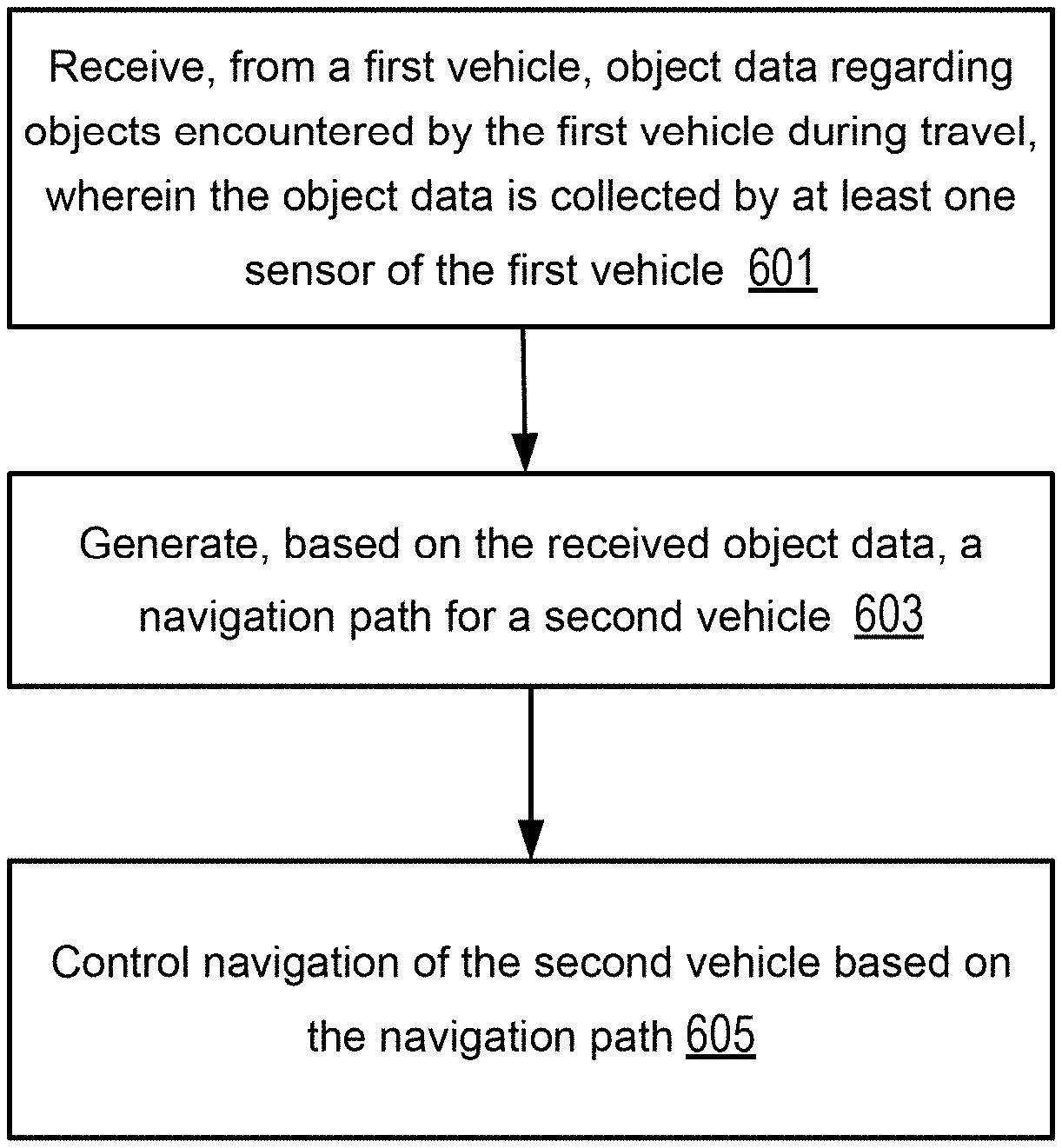
The method includes receiving object data from a computing device regarding a detected object by a vehicle. This object data includes an object type, as well as a location. It also involves storing this object data and then generating navigation data based on that object data. Finally, it involves sending navigation data to another vehicle for the second vehicle to use to control its navigation.

Background for Vehicle navigation using object data from other vehicles
In the case of manually-driven vehicles, “a user of a car can be a driving.” In some cases, like an autonomous vehicle the driver performs less control actions. In terms of operating the vehicle, the user is usually less involved than a?driver? In some cases, for example, the driver may select the destination of the vehicle, without controlling its immediate movement on the road.
Recent developments in the technology of autonomous driving have allowed a computer system to control, at least under certain conditions, elements of a car without assistance from the user. Sensors (e.g. cameras and radars), for example, can be installed in a vehicle to detect conditions on the road. These sensors can detect objects encountered by the vehicle during its travel.
Autonomous cars use sensors and artificial intelligence algorithms in order to detect and analyze objects around them during the travel. Traffic lights, road signs and road lanes are some of the objects that may be encountered. Failure to detect these objects can cause the vehicle to behave in an unexpected way, or in a dangerous manner. This could also expose the passengers and/or other people outside the vehicle to danger.
The vehicle’s sensors also limit the range at which an object can be detected. This range of detection may also be limited by adverse road conditions and/or any other conditions that surround the vehicle while traveling (e.g. stormy weather).
During normal vehicle operation, sensors are used. A computing system installed in the vehicle can analyze sensor inputs and identify conditions to generate commands or control signals for autonomous adjustments of speed and/or direction of the car, without the need of a human driver. “Autonomous driving or advanced driver assistance systems (ADAS) usually use an artificial neural networks (ANN) to identify events and/or items captured by sensor inputs.
In general an artificial neural networks (ANN) uses neurons to process inputs into the network and generate outputs. Each neuron in the network receives inputs from pk. . . In general, the inputs and outputs of a network may vary. Some inputs may come from the network itself, while others may come from the neuron. The input/output relationships among the neurons represent the neuronal connectivity in the system.
Each neuron has a bias (bm), an activation function (fm), and a set synaptic weights (wmk) for its inputs, pk, respectively. . . The activation function can be in the form a step-function, linear function, log-sigmoid, etc. Different neurons within the network can have different activation function.
The relationship between input and output of an ANN is defined by the ANN model. This includes data that represents the connectivity of neurons in the network as well as the synaptic weights wmk, activation function fm and bias bm of each neuron m.
For example the inputs of an ANN may be generated based upon camera inputs, and the outputs of the ANN may be identifications of items, such as events or objects.
For example, U.S. Pat. App. Pub. No. No.

For example, U.S. Pat. App. Pub. No. The patent application 2017/0242436 entitled “Road Construction Detection Systems, and Methods” discloses a way to detect road construction by using an ANN model.
For example, U.S. Pat. Nos. Nos.
In general an ANN can be trained by a supervised training method, where synaptic weights will be adjusted to minimize the error between the known outputs resulting from inputs and the computed outputs derived from applying inputs to the ANN. supervised training methods can include learning with error correction, reinforcement learning and learning.
The exact outputs of a set of inputs are not known a posteriori until the end of training. The ANN may be trained to classify a data point into clusters or a set of inputs into multiple categories.
Multiple training algorithms are usually used for a sophisticated machine-learning/training paradigm.
The disclosures in the patent documents discussed above are hereby incorporated by reference.
The technology that supports autonomous vehicles is constantly improving. Digital camera technology, light detection range (LIDAR) and other technologies are improving and have allowed vehicles to navigate roads without drivers or with minimal assistance. “In some environments, like factories, autonomous cars operate without human interaction whatsoever.
While autonomous technologies are primarily focused on controlling vehicles in the traditional sense, there has been little focus on alternative applications which can be implemented over these autonomous systems. In fact, application-level system tends to reinforce the existing uses of autonomous technology. “For example, autonomous technology has been used to perform functions like returning vehicles to a location known after delivering passengers or refueling vehicles when not in use by passengers.
These approaches, however, do not fully exploit the hardware and processing powers that are implemented in autonomous cars. There is a current need to leverage the hardware already installed in autonomous vehicles for additional services.
It is necessary to solve the technical issue of increasing the range of object detection of a vehicle (such as an autonomous vehicle) during operation. This technical problem is primarily the need to detect objects outside the range of sensor detection of the vehicle. There is a requirement to detect objects around sharp curves on the road. It is necessary to improve the safety of navigation of moving vehicles.

Click here to view the patent on Google Patents.

