Enhancing 3D Video Compression with AI-Powered Multi-Resolution Motion Analysis for Media Streaming
Invented by Ahn; Junghyun, Pang; Jiahao, Lodhi; Muhammad Asad, Tian; Dong

Dissecting a Next-Gen Patent: Multi-Resolution Motion Features for Point Cloud Compression
The world is moving fast, and so is the way we see and share 3D data. Today, let’s take a deep dive into a recent patent application that solves a big problem: how to compress point cloud data in a smart, powerful way. If you’ve ever wondered how self-driving cars, AR/VR headsets, or robots manage to “see” the world in real time, you’re in for a treat. This article is your simple guide to understanding this new invention, why it matters, and how it stands out from everything before it.
Background and Market Context
Imagine you are inside a video game, but the world is not flat. Instead, it’s made up of millions or even billions of tiny dots floating in space. Each dot shows where something is in the real world. This is called a point cloud. Point clouds are not just for games; they are used in self-driving cars, robotics, AR/VR, and even for mapping the world in 3D.
The main reason for using point clouds is that they give a true 3D shape of things around us. For example, a LiDAR sensor on a car spins around and sends out light beams. When these beams bounce back, the sensor knows how far away things are and draws a picture made of dots. This helps the car “see” other cars, people, and even small road signs.
But there’s a problem. These point clouds are huge. A single scan can be millions of points. When you try to send this data over the internet or store it on a phone, it’s often too much. In fast-moving settings, like cars or live VR, you need to send new point clouds many times every second. If the data is too big, everything slows down.
That’s why compression is key. Compression makes the data smaller without losing too much detail. For point clouds, this is very hard because the data is not like a picture (which is a neat square of dots)—it’s scattered in 3D space. And when the world moves (like in video), you need to show how things change from one frame to the next, which is even harder.
The market for 3D point cloud data is exploding. Self-driving cars need to “see” in 3D in real time. Robots in factories need to avoid bumping into things. AR/VR headsets want to mix real and virtual worlds. Even city planners use point clouds to map out buildings and roads. All of these need fast, smart, and small data.
If you can solve the problem of making 3D point cloud data smaller but keep it accurate, you open the door to better, faster, and more reliable technology in almost every field that uses 3D data.
Scientific Rationale and Prior Art
To understand the new invention, let’s look at what came before. In the past, people tried two main ways to compress point cloud data.
The first way was to treat point clouds like images or videos. This is not great, because point clouds are in 3D and don’t line up in a nice grid. The second way was to use “motion vectors,” which show how each point moves from one frame to the next, kind of like arrows pointing from old dots to new dots. But with millions of points, this gets messy and hard to manage.
More recently, smart systems called neural networks started to help. These neural networks can learn patterns in how points move and group them together. Instead of tracking every single dot, they look at blocks or groups and figure out how these move.
Some earlier patents and research found ways to use “feature” information. Instead of just looking at where the dots are, these methods looked at extra details like color or how the points are grouped. They used neural networks to “learn” how to compress the data by focusing on important features.
But there were still problems. Some older methods only worked well when the motion was small or simple. For example, if you had a slow-moving object, the system could predict how it would move. But for fast or complex motion—like a bouncing ball or a person waving their arms—these approaches missed a lot of detail. Also, many systems only used one “resolution” or level of detail. Imagine trying to see a moving car both close up and far away at the same time—you need to see both the big picture and the tiny details.
Some newer research tried to use “multi-resolution” ideas. This means looking at the data at different levels—up close and from far away. But these systems often didn’t merge the different views in a smart way, or they lost detail when merging.
In short, past inventions tried to compress point clouds using features and neural networks, but they struggled with fast or complex motion, or lost important details when combining different levels of data.
The patent application we’re looking at today builds on all this work, but takes it a big step forward.
Invention Description and Key Innovations
The core of this patent is a smart way to compress point cloud data by looking at motion in more than one way—at different “resolutions” or levels of detail—all at once. It uses neural networks to figure out how groups of points move, not just single points, and combines information from different levels to get the best picture.
Here’s how it works, in simple terms:
Step 1: Gather Features
The system starts by looking at two sets of point cloud data—one from the current frame, and one from a previous (reference) frame. It takes the raw data and turns it into “features” using neural network layers. These features are like special codes that describe not just where points are, but also information about shape, texture, or even how the points are grouped.
Step 2: Downsample and Upsample
To see both the big picture and the small details, the system makes smaller, simpler versions of the point clouds (downsampling), and then later makes them bigger again (upsampling). This lets the neural networks “see” motion at different scales. For example, a small downsample might show a whole car moving, while a detailed one could show someone waving inside the car.
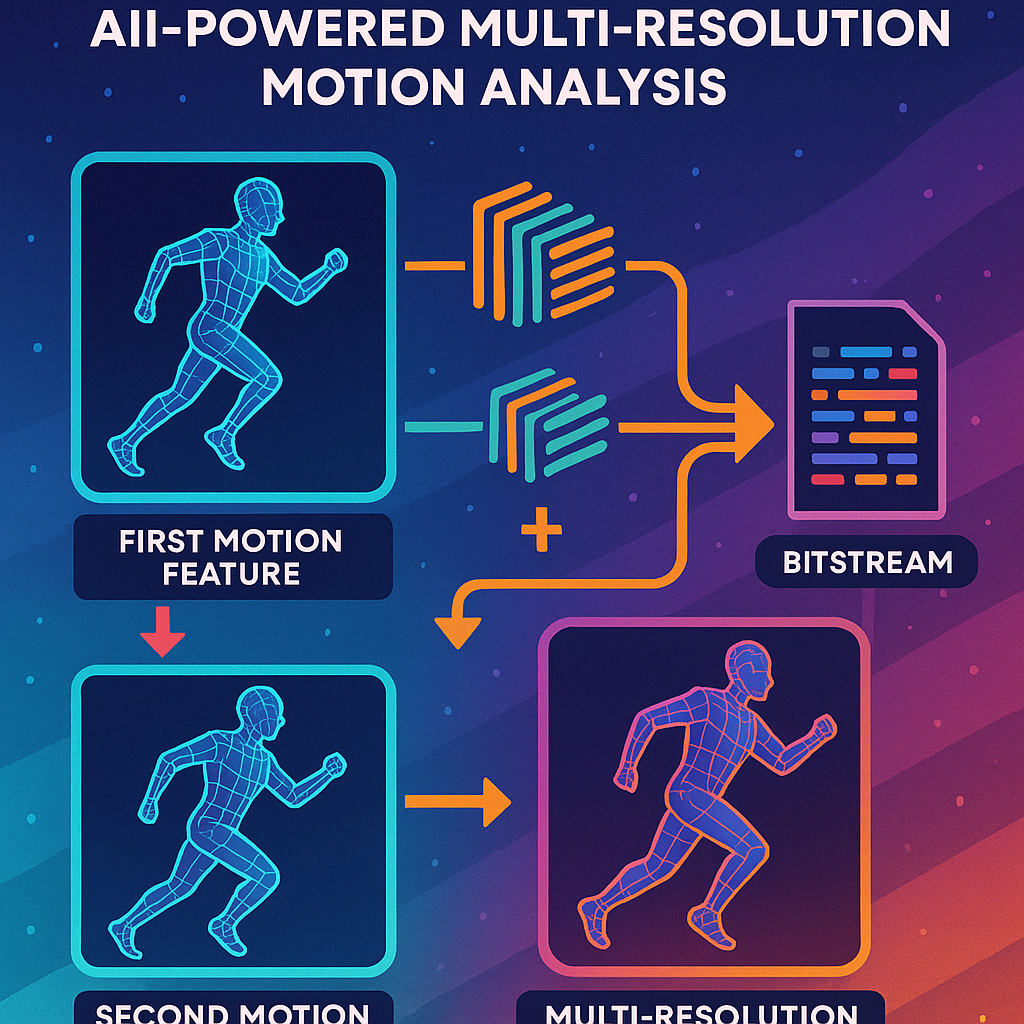
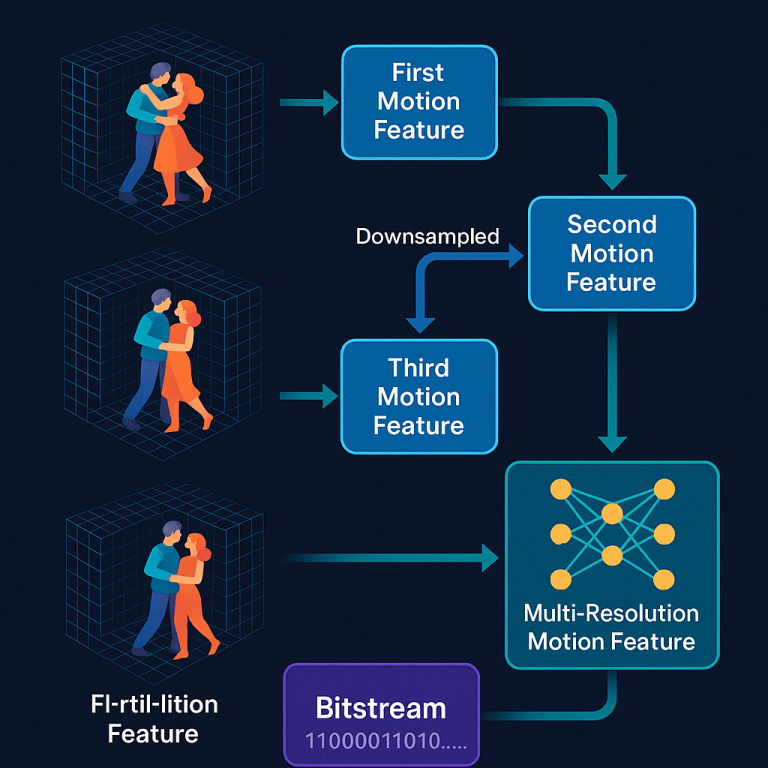
Step 3: Multi-Resolution Motion Features
The magic happens when the system merges the information from all these different levels. It uses more neural network layers to join the features from the original size (high detail) with those from the smaller sizes (bigger picture). This way, the system understands both small movements and big changes at once.
Step 4: Pack Everything Smartly
Once the system has this rich, multi-level motion information, it needs to store or send it. It does this by turning the final combined motion features into a “bitstream.” This is a compact, coded version of the data, made even smaller by quantizing (rounding off numbers in a smart way) and entropy encoding (using fewer bits for common patterns).
Step 5: Decode and Rebuild
When the data is received, the system runs the process in reverse. It unpacks the bitstream, uses neural networks to rebuild the motion features at each level, and puts everything back together to recreate the point cloud as close to the original as possible.
What Makes It Special?
This invention stands out because it doesn’t just look at motion in one way. By combining different levels of detail, it can handle fast, complex, or even tricky motion—like a person jumping, a bouncing ball, or a car driving through fog. It uses neural networks at every step, so it learns the best way to combine and compress features for any type of scene.
It also introduces smart ways to:
– Enhance features before compressing, making sure the most important details are kept.
– Prune or trim away unneeded information, making the final data even smaller.
– Align and merge features from different resolutions, so nothing is lost when jumping between big and small views.
– Use the same system for both encoding (compressing) and decoding (rebuilding), so everything works together smoothly.
Why Does This Matter?
With this kind of compression, you can have faster, clearer 3D video calls, safer self-driving cars, and more lifelike AR/VR experiences. Devices like phones, headsets, and robots can share data quickly and use less battery. Even big industries like city planning or movie-making can handle more data, more easily.
The patent also covers using this method in many different types of devices, from mobile phones to head-mounted displays, and in many settings, from cars to smart homes.
How Can You Use It?
If you’re building a product that needs to send or store 3D point cloud data, this method can help you make your data smaller and faster to use. It works in real time, so you can use it for live video, gaming, navigation, or any system where things move quickly and you need every detail.
Conclusion
This patent application shows a new way to compress and process 3D point cloud data, using neural networks that look at motion at many levels of detail at once. It solves real problems in today’s world—making it easier, faster, and cheaper to work with massive amounts of 3D data. As more and more devices need to “see” and understand the real world in 3D, this invention will help make that possible. Whether for safer cars, richer virtual worlds, or smarter robots, the future is brighter—and smaller—thanks to innovations like this.
Click here https://ppubs.uspto.gov/pubwebapp/ and search 20250365427.

