Invention for Multi-threshold response zone for autonomous vehicle navigation
Invented by Anna Clarke, Eyal Bagon, Mobileye Vision Technologies Ltd
Multi-threshold response zone technology is a type of sensor-based system that uses multiple thresholds to detect and respond to different types of obstacles. The system is designed to detect and respond to obstacles in a dynamic environment, such as pedestrians, other vehicles, and stationary objects. The technology uses a combination of sensors, including cameras, radar, and lidar, to detect and track objects in the vehicle’s surroundings.
The market for multi-threshold response zone technology is driven by the increasing demand for autonomous vehicles. The technology is essential for ensuring the safety of autonomous vehicles, as it enables them to detect and respond to potential hazards in their surroundings. The technology is also essential for improving the efficiency of autonomous vehicles, as it enables them to navigate through complex environments with ease.
The market for multi-threshold response zone technology is expected to grow significantly in the coming years. The technology is expected to be used in a wide range of applications, including transportation, logistics, and delivery. The technology is also expected to be used in other industries, such as agriculture and mining, where autonomous vehicles are becoming increasingly common.
The market for multi-threshold response zone technology is highly competitive, with several companies offering advanced navigation systems. Some of the key players in the market include Waymo, Tesla, Uber, and General Motors. These companies are investing heavily in research and development to improve the performance and reliability of their navigation systems.
In conclusion, the market for multi-threshold response zone technology for autonomous vehicle navigation is rapidly growing. The technology is essential for ensuring the safety and efficiency of autonomous vehicles, and it is expected to be used in a wide range of applications in the coming years. With the increasing demand for autonomous vehicles, the market for multi-threshold response zone technology is expected to continue to grow, and companies that invest in this technology are likely to see significant growth and success in the future.

The Mobileye Vision Technologies Ltd invention works as follows
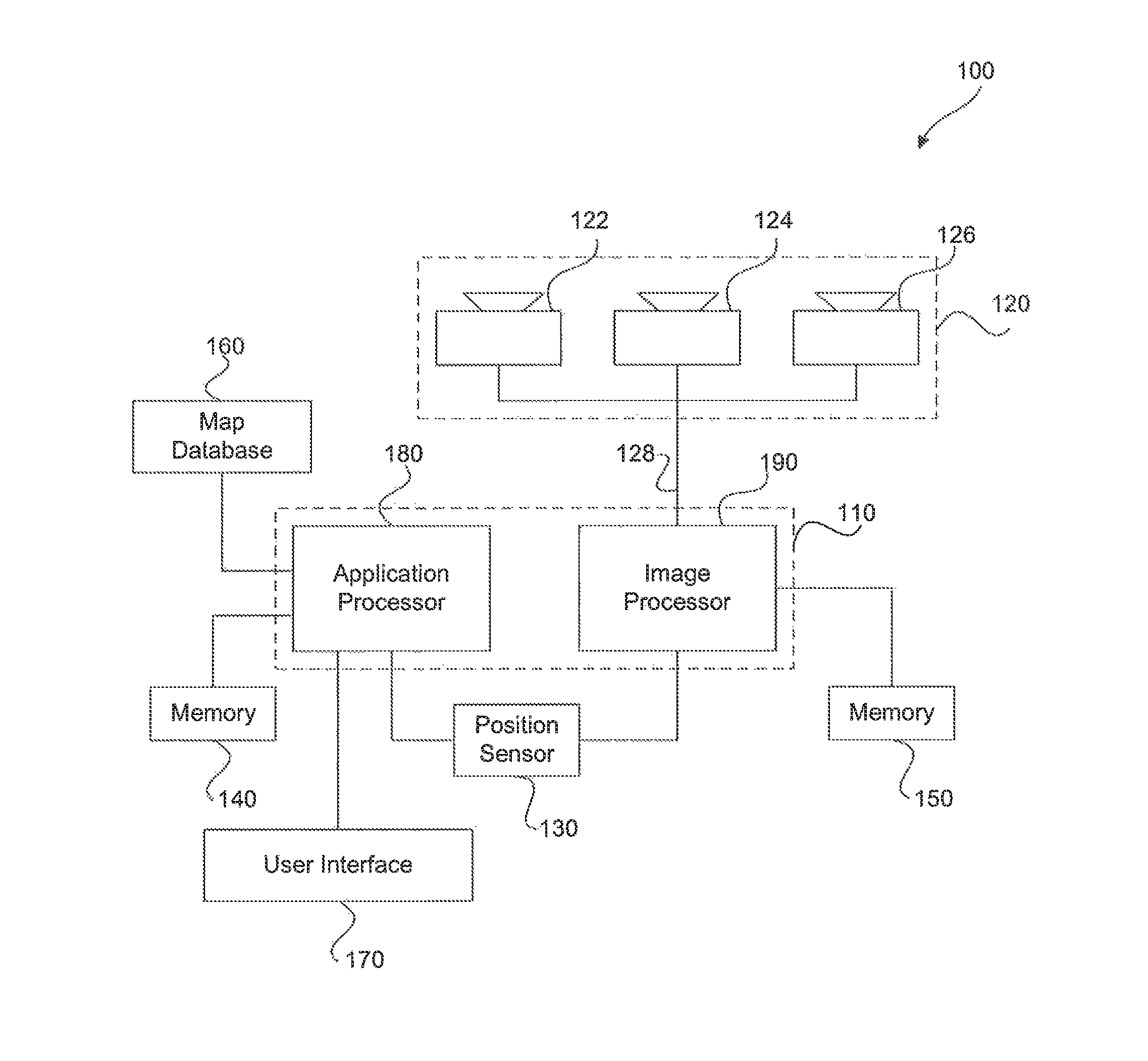
Systems and methods employ cameras to provide autonomous navigation functions. One implementation of a driver-assist navigation system for a primary car may include at most one image capture device that takes a plurality images of an area within the vicinity of the primary car; a data interface; or at least one processing device. The least processing device can be used to: Receive the plurality images via the data interface; identify the target objects within the plurality; monitor the motion of the target objects and determine an indicator of intercept time between primary vehicle, target object, and primary vehicle. This is based on the monitored movement and distance between primary vehicle, target object; and cause a reaction in primary vehicle based upon a comparison between intercept time and a plurality predetermined intercept thresholds.

Background for Multi-threshold response zone for autonomous vehicle navigation
I. “I.
The present disclosure is general in nature and relates to autonomous vehicle navigation, and more specifically to systems and methods that utilize cameras to provide autonomous car navigation features.
II. Background Information
Technology is improving, and the goal of fully autonomous vehicles that can navigate on roads is within reach. An autonomous vehicle might be able to recognize its surroundings and navigate on its own without the assistance of a human operator. An autonomous vehicle may take into consideration a number of factors in order to make the right decisions and safely reach its destination. When a vehicle travels on a road, it may encounter various objects such as pedestrians or other vehicles. These objects may be detected by autonomous driving systems that can take the appropriate and timely actions to avoid collisions. Autonomous driving systems can also identify other indicators, such as traffic signs and traffic signs and lane markings, that regulate vehicle movement (e.g. when the vehicle may stop or go, the speed at which it must travel, the position of the vehicle on the roadway, etc.). Autonomous driving systems might need to know when a vehicle is allowed to change lanes, turn at intersections or change roadways. These examples show that there are many factors that need to be considered in order for an autonomous vehicle to navigate safely and accurately.
Embodiments compatible with the present disclosure provide systems, methods, and devices for autonomous vehicle navigation. Cameras can be used to provide autonomous vehicle navigation features in the disclosed embodiments. The disclosed systems could include one, two or more cameras to monitor the vehicle’s environment and trigger a navigational response that is based on the analysis of images taken by the cameras.
A driver assist navigation system for a vehicle is provided in accordance with the disclosed embodiment. A minimum of one image capture device is used to take multiple images of a vehicle’s surroundings; a data interface; as well as at least one processing device. The least one processing device can be used to: Receive the plurality images via the data interface; Determine a first lane restriction on a first vehicle side; Determine a second vehicle lane restrict on a second vehicle side; wherein the first and third lane conditions define a vehicle’s lane and determine if there is a vehicle offset condition on the second vehicle side; If so, allow the vehicle to travel within those lane restrictions.
A vehicle may also include a first vehicle, second vehicle sides and at least one image capture device to take a plurality images of a area within the vehicle’s vicinity. The at least one processing unit may be used to: Receive the plurality images via the data interface; Determine a first lane restriction on the side of the first vehicle; Determine from the plurality images a second-lane constraint for the side of the second car; If a condition is present on the side of the first vehicle, allow the vehicle to travel within that lane.
A method for navigation of a vehicle is provided in accordance with another disclosed embodiment. This method can include taking a number of images of a location around the vehicle using at least one camera; determining a first lane restriction on a side opposite to the first; determining a second constraint on another side, wherein the first and third lane conditions define a path for the vehicle. The vehicle will travel within the first two lane restrictions, with the first being greater than the second; determining if there is a condition on the other side of vehicle; and if so, the vehicle will travels within the second
A driver assist navigation system for a vehicle is provided in accordance with the disclosed embodiment. The system may include at most one image capture device that takes multiple images of a vehicle’s surroundings; a data interface; or at least one processing device. The least processing device can be configured to receive the plurality images via the data interface, determine the current lane to travel from among a plurality travel lanes, and change lanes if it is different from a predetermined default travel route.
In accordance with another embodiment, a vehicle can include a body, at least one image capture apparatus configured to take a plurality images of an area within the vehicle’s vicinity; a data interface; as well as at least one processing device. One of the processing devices may be configured to receive the plurality images via the data interface, determine the current lane to travel from among a plurality travel lanes; or cause the vehicle’s to change lanes if it is not the same as a predetermined default lane.

A method for navigating a vehicle is provided in accordance with another disclosed embodiment. This method could include taking a number of images of a location near the vehicle using at least one camera; determining the current lane to travel from among a plurality available travel lanes; and changing lanes if the current travel lane is different from a predetermined default travel route.
A driver assist navigation system for a vehicle is provided in accordance with the disclosed embodiment. The system may include at most one image capture device that can take a plurality images of an area within the vehicle’s vicinity; a data interface; or at least one processing device. One of the processing devices may be configured to receive the plurality images via the data interface, recognize a curve to navigate based upon map data and vehicle position data, determine an initial target speed for the vehicle, adjust a vehicle’s velocity to that velocity, and determine one or more observed characteristics about the curve. The updated target velocity can then be determined based the one or two observed characteristics of curve and adjusted the vehicle’s velocity to match the updated target velocity.
A vehicle may also include a body, at least one image capture apparatus that can take a plurality images of a area within the vehicle’s vicinity; a data interface; as well as a processing device. One of the processing devices may be configured to: receive a plurality images via the data interface; recognize and navigate a curve based upon map data and vehicle position data; adjust a vehicle’s velocity to the initial target speed; determine one or more observed characteristics; update the target velocity based upon the one or two observed characteristics; and adjust vehicle velocity to the updated target.
A method for navigating a vehicle is provided in accordance with another disclosed embodiment. This method can include taking a plurality images of an area within the vehicle’s vicinity using at least 1 image capture device; recognizing a curve to navigate based upon map data and vehicle position data; setting an initial target speed for the vehicle based at least on one characteristic of that curve; adjusting the vehicle’s velocity to that initial velocity; determining one or more observed characteristics about the curve; then adjusting the vehicle’s velocity to the updated target.
A driver assist navigation system for a primary vehicle is provided in accordance with the disclosed embodiment. The system may include at most one image capture device that can take a plurality images of an area within the vicinity of the primary car; a data interface; or at least one processing device. The minimum one processing device can be used to: Receive the plurality images via the data interface; determine a first lane restriction on a first vehicle side; determine a second vehicle lane constraint at a second vehicle side opposite the first vehicle side; cause the primary car to travel within the first two lane restrictions; locate a leading vehicle in the plurality images; determine, based upon the plurality images, at most one action taken or the primary vehicles; and cause the primary to imitate the action of at least one vehicle
A primary vehicle may be configured in accordance with another disclosed embodiment. It may contain a body, at least one image capture apparatus that can acquire multiple images of an area within the vicinity of the primary car; a data interface; or at least one processing device. The least one processing device can be configured to: Receive the plurality images via the data interface; determine a first lane restriction on a first vehicle side; determine a second vehicle lane constraint at a second vehicle side opposite the first vehicle side; cause the primary car to travel within the first two lane restrictions; locate a leading vehicle in the plurality images; determine, based upon the plurality images, at most one action taken or the primary vehicles; and cause the primary to imitate the action of at least one vehicle
A method for navigation of a primary vehicle is provided in accordance with another embodiment. This method involves taking a plurality images of an area within the vicinity of the primary car; determining a first lane restriction on a first vehicle side; determining a second vehicle side constraint on the second vehicle side; causing the primary to travel within the first and secondary lane restrictions; locating a leading vehicle in the plurality images; determining, based upon the plurality images, at most one action taken or the primary to imitate the action of that vehicle.
A driver assist navigation system for a vehicle is provided in accordance with the disclosed embodiment. The system may include at most one image capture device that can take a plurality images of an area within the vicinity of the user car; a data interface; or at least one processing device. The minimum one processing device can be used to: Receive the plurality images via the data interface; determine a first lane restriction on a first-side of the vehicle; determine from a plurality images a second constraint on another side of a user vehicle that is opposite to the first; allow the vehicle to pass the target car if it is in a different lane from the one in which it is traveling; monitor the position of the target vehicles based upon the plurality images; and cause the vehicle to stop the vehicle
A user vehicle may also include an image capture device that can take a plurality images of an area within the vicinity of the vehicle, as well as a data interface and at least one processing unit. The at least one processing unit may be configured to: Receive the plurality images via the data interface; determine a first lane restriction on a first-side of the vehicle; determine from a plurality images a second constraint on another side of a user vehicle that is opposite to the first; allow the vehicle to pass the target car if it is in a different lane from the one in which the vehicle is traveling; monitor the position of the target vehicles based upon the plurality images; and cause the vehicle to stop the vehicle from moving in the vehicle.
A method for navigation of a user vehicle is provided in accordance with another embodiment. This method can include taking a plurality images of an area within the vicinity of the vehicle and then determining a first lane restriction on that side. Using the plurality images, the second lane constraint is on the opposite side of user vehicle. The plurality images are used to acquire a target vehicle. If the target is in a different lane, the user vehicles is able to pass it.

A driver assist navigation system for a vehicle is provided in accordance with the disclosed embodiment. The system may include at most one image capture device that takes a plurality images of an area within the vicinity of the user car; a data interface; or at least one processing device. The processing device may be configured for the following: Receive the plurality images via the data interface; determine a first lane restriction on a first-side of the vehicle; determine from multiple images a second constraint on another side of that vehicle; determine, based upon the plurality images, whether an approaching vehicle is on the other side of user vehicle; cause the vehicle to maintain its current velocity and travel within the first or second lane restrictions so that a first distance on the side that the approaching vehicle is coming from is greater than

Click here to view the patent on Google Patents.