Invention for Methods and systems for driving mode switching in hybrid driving based on self-aware capability parameters
Invented by Hao Zheng, Timothy Patrick Daly, JR., David Wanqian LIU, PlusAI Corp
The traditional driving mode switching systems are based on pre-defined rules and do not take into account the driver’s behavior and the vehicle’s self-awareness. This can lead to inefficient driving and reduced fuel economy. To address this issue, methods and systems for driving mode switching based on self-aware capability parameters have been developed.
Self-aware capability parameters refer to the vehicle’s ability to monitor and analyze its own performance, as well as the driver’s behavior and preferences. This information is then used to optimize the driving mode switching system, resulting in improved fuel economy and a better driving experience.
One example of a self-aware capability parameter is the vehicle’s energy management system, which monitors the battery’s state of charge and adjusts the driving mode accordingly. Another example is the driver’s behavior, which can be analyzed to determine the optimal driving mode for a given situation.
The market for methods and systems for driving mode switching based on self-aware capability parameters is expected to grow significantly in the coming years. According to a report by MarketsandMarkets, the global market for hybrid and electric vehicles is expected to reach $465 billion by 2025, with a compound annual growth rate of 22.9%.
The key players in this market include major automotive manufacturers such as Toyota, Honda, and Ford, as well as technology companies such as Bosch and Continental. These companies are investing heavily in research and development to improve the efficiency and effectiveness of hybrid driving mode switching systems.
In conclusion, the market for methods and systems for driving mode switching in hybrid driving based on self-aware capability parameters is a rapidly growing industry. With the increasing demand for eco-friendly and fuel-efficient vehicles, the importance of efficient driving mode switching systems cannot be overstated. As technology continues to advance, we can expect to see even more innovative solutions in this field.
![]()
The PlusAI Corp invention works as follows
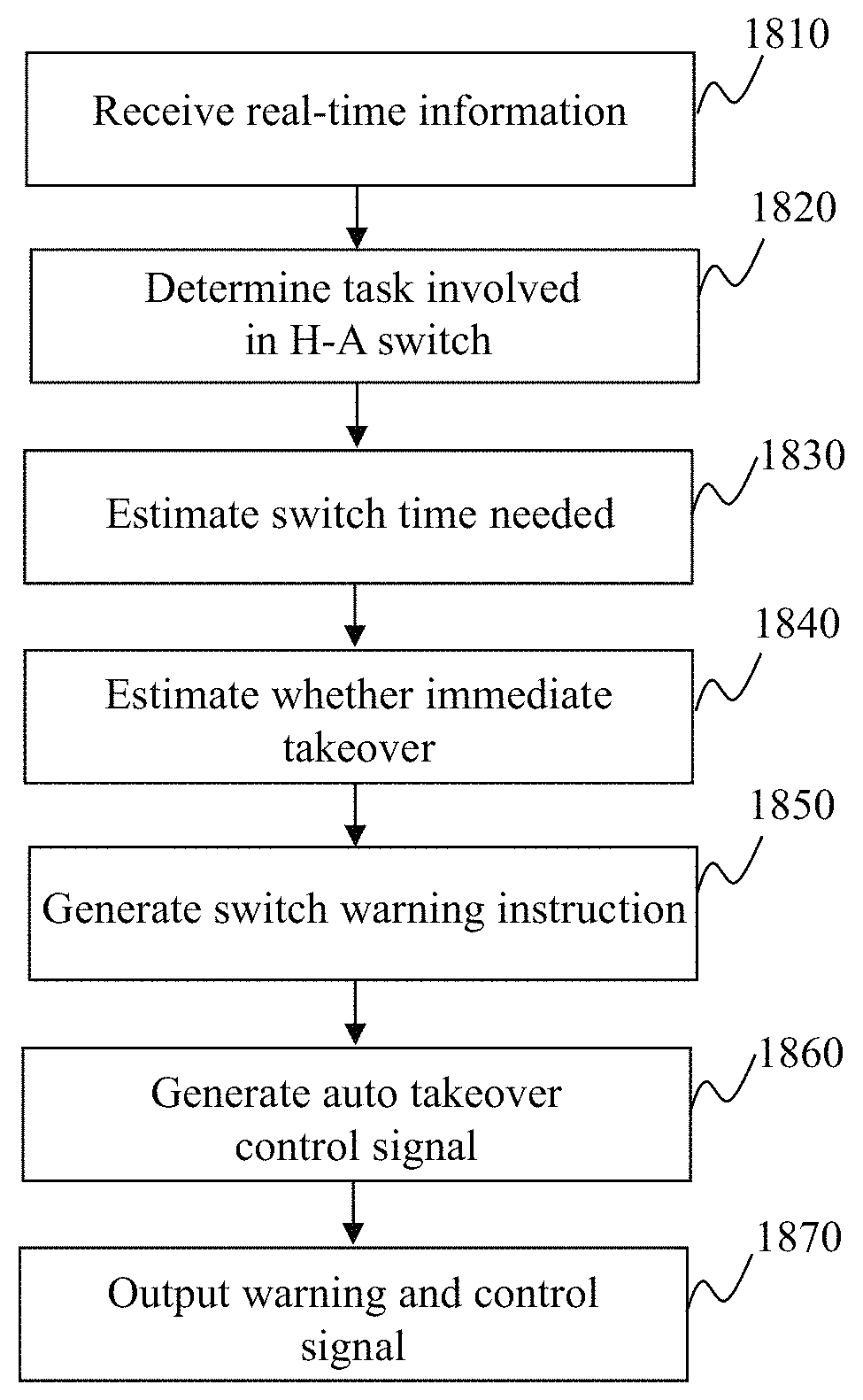
The present teaching is about a method, system, or medium for changing a vehicle’s mode. The vehicle’s real-time data, including intrinsic/extrinsic capabilities parameters, are used to determine the tasks required to switch between a current and a different mode. Based on the first risk assessment with regard to the current mode, and the real-time information, the first time it takes for the switch to take is determined. Each task has a task duration that a driver must complete in order to be able to perform the task. The second risk of the switching is calculated based on the first time the task takes and the total time it takes to complete the set. When the second risk meets a criterion, the switch is made.

Background for Methods and systems for driving mode switching in hybrid driving based on self-aware capability parameters
1. “1.
The present teaching generally pertains to autonomous and hybrid vehicles. The present teaching is more specific and relates to the operation of a vehicle and its augmented behavior planning interface.
2. “2.
Autonomous vehicles use various computing methods to assist automated vehicle operation. In recent years, automotive companies have been focusing on autonomous vehicle operation in a safe way. Autonomous driving vehicles permit a driver (or passenger) to switch between a human driving mode (i.e. where the operator controls the vehicle fully) and an autonomous driving mode (i.e. where the vehicle drives itself). Hybrid driving vehicles can operate in both autonomous and manual modes.
In the past, switching between manual and autonomous driving modes was done manually. If the switching is done in certain circumstances, it can pose a danger in operation. The passenger’s state may also affect the way an autonomous driving vehicle switches the control to a human driver if it detects danger. In an autonomous driving mode, a passenger might have fallen asleep or been less attentive while driving. These real problems in autonomous driving are not being addressed.
Another aspect is automatic switching in a hybrid vehicle of driving modes in reverse, i.e. from a human driving mode into an autonomous driving mode. Traditional approaches don’t address this aspect, nor how to do it safely.
There is therefore a need to find solutions to such problems.
The teachings herein concern methods, systems and programming to augment behavior planning in autonomous and mixed vehicular driving environments. The present teaching is primarily about methods, systems and programming that relate to handover operations for vehicles operating in different modes.
A method for switching vehicles from one mode to another is disclosed by one aspect of this disclosure. There are several steps to the method. The vehicle’s real-time data, including intrinsic/extrinsic capabilities parameters, are used to determine the tasks required to switch between a current and a different mode. Based on the first risk assessment with regard to the current mode, and the real-time information, the first time it takes for the switch to take is determined. Each task has a task duration that a driver must complete in order to be able to perform the task. The second risk of the switching is calculated based on the first time the task takes and the total time it takes to complete the task. When the second risk meets a criterion, the switch is made.
A system for switching a vehicle between a current and a different mode is disclosed in one aspect of this disclosure. The system includes a switch task estimate, a response-time estimator and a switching risk estimator. A switch executor is also included. The switch task estimator can receive real-time vehicle data. This includes intrinsic capability parameters as well as extrinsic capabilities parameters. It then determines, based upon the real time data, a set task to perform to switch the vehicle between a current and a different mode according to a task model. Based on the first risk assessment with respect to the current modes and the real-time information, the response time estimator determines the time it takes to switch to the new mode. It then estimates the time that a driver must spend to complete each task. The switching risk estimator can be used to calculate a second chance of switching from the current to the other mode. This is based on the first time required and the total time it takes to complete the tasks. It is based upon the task duration times. In response to the second risk meeting a criterion, a switch executor is set up to change the vehicle from the current to the other mode.

Other concepts refer to software that implements the present teaching on creating a vehicular systems. According to this concept, a software product includes at least one machine-readable, non-transitory medium, and the information contained within it. Information carried by the medium can include executable code data, parameters associated with the executable code and/or information about a user, a request or content.
In one instance, a machine-readable medium containing information for switching a vehicle between a current mode and a different mode is disclosed. The information can be read by the machine and causes it to perform various actions. The vehicle’s real-time data, including intrinsic/extrinsic capabilities parameters, are available. These parameters allow the machine to determine the tasks that it must perform to switch between a current and a different mode. Based on the first risk assessment with regard to the current mode, and the real-time information, the first time it takes for the switch to take is determined. Each task has a task duration that a driver must complete in order to be able to perform the task. The second risk of the switching is calculated based on the first time the task takes and the total task duration required to complete the set. When the second risk meets a criterion, the switch is made.
Additional benefits and novel features will also be described in part in this description. These will become apparent to skilled art-workers upon inspection of the following and the accompanying drawings. Or, they may be learned through the production and operation of the examples. You can realize the benefits of the present teachings by practicing or using the various methodologies, instruments and combinations discussed in the following examples.
The following detailed description contains many specific details that are illustrated with examples to help you understand the teachings. It should be obvious to anyone skilled in the art, however, that the teachings can be applied without providing such details. Other instances of well-known methods, components, or circuitry were described at a high level, without any detail to avoid obscure aspects of the current teachings.
An autonomous vehicle is one that can sense its surroundings and navigate through it without any human input. To detect their surroundings, autonomous cars can use a variety techniques, including radar, laser light and GPS. Advanced control systems use sensory information to determine the best navigation paths and identify obstacles or signage. Autonomous cars are equipped with control systems that can analyze sensory data and distinguish between cars on the road. Autonomous vehicles have potential benefits such as reduced infrastructure and mobility costs, increased safety and mobility, customer satisfaction, and lower crime. Autonomous vehicles can reduce traffic collisions and other costs, as well as less insurance. The autonomous vehicles will increase traffic flow, reduce the need for drivers and navigators, and decrease fuel consumption.
However, autonomous vehicle adoption is not without its challenges. There are many factors that can hinder the widespread adoption of autonomous vehicles. These include disputes over liability, the time frame needed to replace existing vehicles, resistance from individuals to forfeit control and consumer safety concerns. It is also important to establish a legal framework that works and to implement regulations. Below is a description of a vehicle system that uses both an autonomous and a human-driver mode. The terms “autonomous mode” and “autonomous drive” are used in this disclosure. Auto mode and?autonomous mode? are interchangeable to refer to an automatic operation of the vehicle. These terms are interchangeable to refer to automatic vehicle operation. The terms?human-driver? mode? ?manual mode’ and?automatic mode? They can be used interchangeably to represent operating the vehicle by a human driver.
FIG. “FIG. FIG. FIG. 1 shows the vehicle’s driving mode switching unit 130, and multi-modal switching warning units 140. The vehicle can be operated in either an autonomous mode 150, or a human driver mode 160. The driving mode switch unit 130 can be used to change the mode of operation between an autonomous mode 150 or a human-driver modes 160.
By one embodiment the driving mode switch unit 130 determines the current mode in which the vehicle operates. The driving mode switching unit 130 determines the vehicle’s current mode of operation based on certain criteria. These criteria are described next. 2) determines if a transition to another mode is necessary. If the current mode of operation is the autonomous or human-driver modes, the driving mode switch unit 130 determines, using a criteria associated with operating the vehicle currently, whether a transition into the human-driver (or alternatively the autonomous) mode is necessary. The driving mode switching unit 130 will instruct a multi-modal switching alert unit 140 to indicate the intention to change the mode of operation if the driver affirmatively decides to do so.
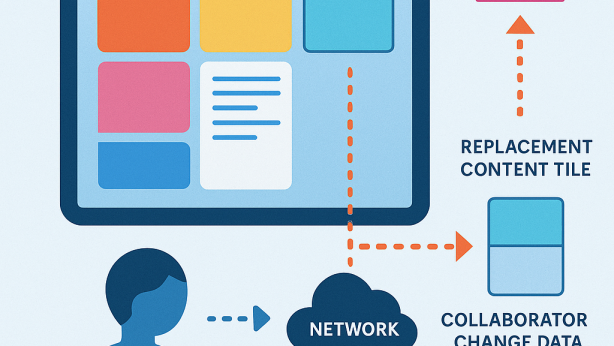
The multi-modal switching warning system 140 delivers warning signals to the operator (described below with reference to FIG. 21) to the operator (e.g. driver) of a vehicle. The warning signals could also include tasks that the driver must perform in order to change the vehicle’s operating mode in an efficient way. In one embodiment, the multimodal switching warning unit 140 monitors and controls the driver’s performance to ensure that the tasks are completed on time. The multi-modal switching unit 140 monitors the status of each task assigned to the driver to make sure that it is completed in a timely fashion. The feedback signal sent by the driving mode switching unit 130 indicates the status of each task assigned to the vehicle driver. The driving mode switching unit 130 switches the vehicle’s operation mode based on the completion of each task. In one embodiment, the driving mode switch unit 130 will receive a feedback signal to indicate that an exception handling process must be initiated if a task is not completed within a specified time. The remainder of this disclosure will provide details about the operation of the multi-modal switching warning unit 140 and driving mode switching unit 130.
FIG. “FIG. A driving mode switching unit 130 contains a current risk assessor 230, and a switch risk determinar 240. It also includes a switch executor 250, a warning control unit 250, and a driver profile. There is also a map/road configuration model 210.

The current risk assessor 230 is used to evaluate the risk of operating the vehicle in an current mode. One embodiment of the current risk evaluator230 uses real-time vehicle data, real time intrinsic and extrinsic information, and driver profile data 210 to determine the risk. The map/roadconfig data 220 contains information about the current location of the vehicle. The map/road configuration 220 can also include traffic information for the geographic location of the vehicle. Driver profile data 210 includes information about the driver’s driving record. This information could include information about the driver’s driving history, such as the number of violations that the driver has committed within a certain time period, the model of the vehicle being operated, and characteristics such as whether the driver needs to wear prescription glasses or devices to aid in driving the vehicle.

Click here to view the patent on Google Patents.