Machine Learning Detects GPS Data Errors for Safer, More Reliable Smart Mobility Solutions
Invented by NAYAK; Amarnath, RAUT; Advait Mohan, AVERBUCH; Aleksandr

Accurate location data is vital for cars, trucks, and even delivery robots to know exactly where they are on the road. But, even with advanced satellite systems like GPS, errors can creep in. Let’s explore a new way to predict these errors using machine learning, making navigation smarter and safer.
Background and Market Context
Imagine you are driving through a busy city with tall buildings, or winding through mountains with tunnels and bridges. Your car’s navigation system uses satellites to tell you where you are. This technology—called GNSS, which stands for Global Navigation Satellite Systems—includes common systems like GPS, Galileo, and GLONASS. GNSS is everywhere: in cars, phones, and delivery trucks, helping us find our way, track shipments, and plan our routes efficiently.
But GNSS isn’t perfect. Sometimes, your location bounces around on the map, especially when signals get blocked by buildings or mountains. The reasons are many: interference in the air, signals reflecting off shiny surfaces, or even errors in the satellite’s own clocks. When these errors happen, your true position and what the system thinks can be far apart. For most everyday uses, a small error is fine. If your pizza arrives a few meters off, you’ll still get it. But in cases like self-driving cars, delivery robots, or precise surveying, even a tiny mistake can be a big problem.
Companies are racing to make navigation more accurate. This means not just knowing where you are, but also knowing how likely it is that your location is off by a few meters or more. If a delivery truck knows that its location reading is unreliable, it can slow down, ask for help, or switch from self-driving to manual mode. This can save time, money, and even lives.
Today, most location sensors make rough guesses about their own errors, often just by counting how many satellites they can see. But these guesses ignore many other factors—like the shape of the road, nearby buildings, or the slope of the land. These ignored factors can cause big surprises in the real world, especially in crowded cities or rough terrain.
What if a system could learn from past errors? What if it could look at the road ahead and know, ahead of time, how risky the location readings might be? This is the heart of the invention we’re exploring. It uses machine learning—a type of computer intelligence that learns patterns from real data—to predict how much error to expect, based on details about the road, terrain, and more. This makes navigation not only smarter, but also safer and more trustworthy.
Scientific Rationale and Prior Art
To understand why this new idea is so powerful, let’s first look at how errors creep into location data, and what others have tried before.
Satellites send signals down to Earth. Your car or phone listens for these signals and uses math to figure out your position. But the world is messy. Weather can bend signals, buildings can block or bounce them, and trees or bridges can hide you from view. Each of these problems adds a little error. Sometimes, the error is small; other times, it can be several meters or more.
Most devices try to estimate their own error by looking at the quality of satellite signals. If you can only “see” a few satellites, or the signals are weak, your device will show a big “error circle” on the map. But this is just a guess. It doesn’t know about that big metal bridge ahead, or the wall of glass buildings you’re about to pass.
Some advanced cars use extra sensors—like cameras, LiDAR, or very precise GPS units—to double-check their location. These systems can be expensive and are not always available. Other methods “map-match” the GPS reading to the nearest road or lane, but again, this assumes the map is perfect and doesn’t always account for unusual road layouts or new construction.
Researchers have tried to fix these problems in a few ways:
- Some use statistical methods, like Kalman filters, to smooth out the errors over time, but these still can’t predict when the error will suddenly jump—for example, when you drive into a tunnel.
- Others use crowdsourced data, collecting many readings from lots of users to build a “heat map” of error-prone spots, but this approach is slow and depends on lots of people sharing data.
- A few try to use extra data about the environment, like known locations for tall buildings or bridges, but usually this is coded by hand and is not flexible or up-to-date.
The common thread in older solutions is that they are either too simple (just counting satellites), too slow (waiting for lots of data), or too rigid (hard-coded rules for special places). None of them can quickly adapt to new places or new problems.
The scientific leap in the new approach is to use machine learning. By training a computer model on real errors—collected by comparing what GNSS says with verified, highly accurate positions—the system learns not just when errors happen, but also why. It looks at features like the shape of the lane, the slope of the road, nearby buildings, and even the presence of tunnels or bridges. If it sees a steep hill or a dense city block, it can predict that GNSS readings might be less reliable.
This makes the system “smart” in a new way. It can predict error before it happens, and for places it has never seen before. By constantly learning from new data, it stays up-to-date as roads change, new buildings are built, or weather patterns shift. This is a big step beyond the old ways, and it opens up new possibilities for safer self-driving, more reliable delivery, and better mapping.
Invention Description and Key Innovations
Let’s break down how this new system works, in plain language, and see why it stands out.
The core idea is simple: teach a computer to predict how much error a location reading might have, using real data and lots of helpful details about each road segment.
Here’s how it works:
1. Getting the Lay of the Land
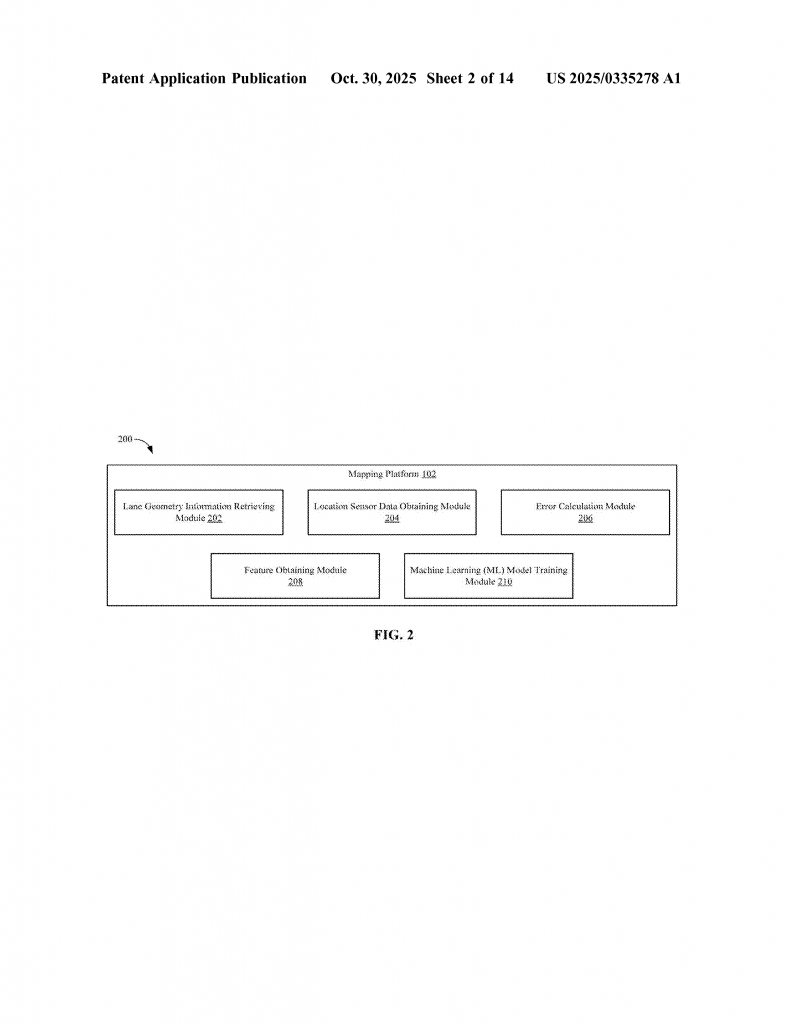
First, the system pulls up information about the road—specifically, the shape and path of each lane. This comes from a detailed map database. For example, on a city street, it knows where every lane goes, how wide it is, and how it curves.
2. Collecting Real-World Data
Next, the system gets actual location readings from vehicles driving on the road. These readings are taken by standard GNSS sensors, like the GPS units in most cars. But to know the “true” position, the system uses special vehicles with highly accurate sensors—like top-grade GPS, LiDAR, and cameras—to create a trusted record of where the car really was.
3. Measuring the Error
For every point where a location reading was taken, the system checks how far off it was from the “true” position on the lane. If the GNSS reading says the car was five meters to the left of the lane, that’s a five-meter error. This process is repeated for lots of points along the road, building up a picture of typical errors in different spots.
4. Looking for Patterns
But the system doesn’t stop there. For each location, it gathers extra details: How high above sea level is this spot? Is the road flat or steep? Are there big buildings or bridges nearby? Is it a city street or a country road? How many lanes are there? Is there heavy traffic at this time? All these details are called “features.”
5. Training the Machine Learning Model
Now, the magic happens. The system feeds all this data—both the actual errors and the features of each point—into a machine learning model. This is like teaching a computer to spot patterns. The model learns, for example, that errors are bigger near tall buildings, or on roads that twist and turn, or when the slope changes quickly.
6. Making Predictions
Once trained, the model can look at any new road segment—even one it has never seen before—and, using the same features (lane shape, terrain, nearby objects), predict how big the GNSS error is likely to be. If it sees that a lane runs under a bridge or through a tunnel, it knows errors might be higher, and it can warn the vehicle or navigation system.
7. Updating the Map Database
Importantly, the system can save these predicted errors back into the map database. So, the next time someone drives that road, the navigation system already knows which spots are tricky, and can adjust its advice accordingly.
8. Real-World Use
The system isn’t just for maps. In self-driving cars, if the predicted error for the next stretch of road is too high, the car can slow down, switch to manual driving, or alert the driver. Delivery robots can avoid risky paths. Fleet operators can plan routes with more reliable location data, saving time and avoiding accidents.
Why is This Different?
This invention does a few things that older systems cannot:
- It considers many types of features—not just satellite signal strength, but also the shape of the road, steepness, nearby structures, and more.
- It learns from real, measured errors instead of just guessing or relying on rules.
- It can predict errors for new roads or places, as long as it has the right features.
- It can update itself as new data comes in, staying current with changes in the world.
- It helps both in planning (before a trip) and in real-time (during a trip), making navigation more reliable.
Technical Details Made Simple
Behind the scenes, the system uses clever ways to organize and process data. Here’s a simple breakdown:
- It splits long roads into shorter pieces (segments), so predictions can be more precise.
- It groups data by lane, since errors can vary even between lanes on the same road.
- It handles special cases like bridges, tunnels, and parking structures, since these often cause big errors.
- It can use different types of machine learning models, like Random Forest or XGBoost, which are good at handling mixed types of data and finding patterns.
How Does Training Work?
The system collects lots of examples of real errors and features—this is called the “training set.” The model “learns” by trying to predict the error from the features, and then adjusting itself when it gets it wrong. Over time, it gets better at making accurate predictions. The more diverse and rich the data, the smarter the model becomes.
How Does Prediction Work?
After training, the model is ready for action. When a vehicle is about to drive on a certain road, the system looks up the features of that road segment and runs them through the model. The output is a predicted error—like “expect up to 10 meters of error on this segment.” If this is too high, the system can warn the driver or adjust the navigation plan.
Keeping it Fresh
As more vehicles drive and collect new data, the system can retrain itself, getting smarter over time. Roads change—new buildings go up, old ones come down, new tunnels are built. This feedback loop means the system never goes out of date.
Flexible and Scalable
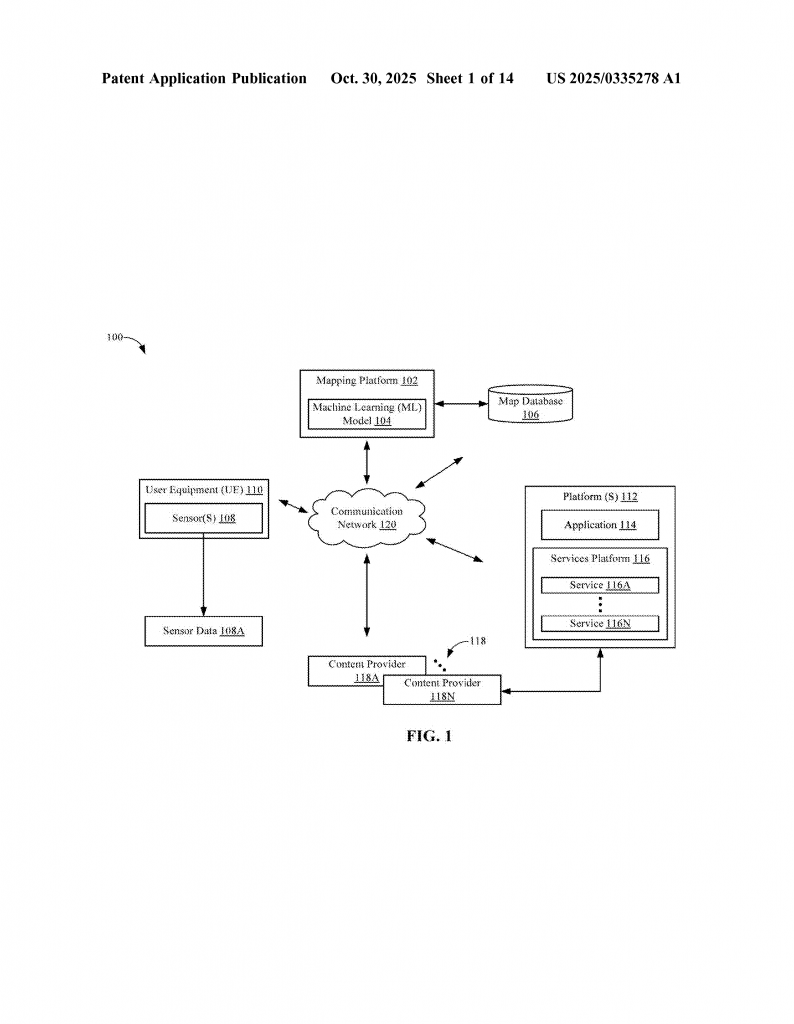
The invention works for all kinds of vehicles, from cars to trucks to delivery robots. It can be installed on the vehicle itself, run in the cloud, or work as part of a mapping service. It can handle any location where enough data is available, and it adapts to new environments quickly.
Impact on Safety and Efficiency
By knowing where and when GNSS errors are likely, vehicles can make smarter choices. Self-driving cars can avoid risky moves, deliveries can be more precise, and mapping services can guide users with more confidence. Over time, this can lead to fewer accidents, faster deliveries, and happier users.
Conclusion
Location errors are a fact of life with satellite navigation, but they don’t have to be a mystery. With this new approach, powered by machine learning and smart use of real-world features, navigation systems can predict when and where errors will happen. This means safer roads, smarter vehicles, and better maps for everyone. As the world moves towards more automation and smarter logistics, inventions like this will be the backbone of reliable, trustworthy navigation.
By understanding and predicting GNSS errors before they become a problem, we can drive into a future where getting lost—or ending up in the wrong lane—is a thing of the past. This is more than just a technical fix; it’s a smarter, safer way to guide the journeys of tomorrow.
Click here https://ppubs.uspto.gov/pubwebapp/ and search 20250335278.