Wireless Magnetic Therapy Devices Offer Precise, Non-Invasive Treatment for Musculoskeletal Health
Invented by Zhang; Xiaojia Shelly, Wang; Hua, Wang; Chao, Zhao; Zhi, Han; Joonsu, Sharma; Arvin Ardebili
Imagine a tiny, soft device that can help heal tissues inside your body, all without wires or bulky machines. Thanks to new advances in science and engineering, this dream is now much closer to reality. In this article, we will break down a new patent application for a wireless, programmable soft robot designed to stimulate and repair tissues through gentle, controlled movements—using only a magnetic field. Let’s explore how this invention fits into the world today, the science behind it, and what makes it truly innovative.
Background and Market Context
For many years, doctors and scientists have known that moving or gently pressing on injured tissues can help them heal. This kind of treatment is called mechanotherapy. It works by sending mechanical forces—like stretching, compressing, or squeezing—to the tissue, which can encourage cells to grow, multiply, and repair themselves. Mechanotherapy is used to help muscles recover after injury, to heal skin wounds, and to improve blood flow after surgery.
But there’s a big problem: most of the machines that can deliver these helpful forces are large, heavy, and complicated. Think of the big robotic devices sometimes used in hospitals for physical therapy. While they can help, they have serious drawbacks:
- They are too large or heavy to use on deep, internal tissues.
- They require wires, making them uncomfortable or impossible to use inside the body.
- They can only act on the surface, not deep inside muscles or organs.
- They need to be controlled by skilled operators and are expensive to use.
Recently, scientists have tried to make smaller, more flexible devices. One example is an adhesive “patch” that sticks to muscles and uses heat to contract and deliver force. But even this needs a wire to provide electricity, which limits where and how it can be used. Plus, using heat inside the body can be risky.
So, there is a big need for a soft, wireless device that can be placed right on or inside tissues and controlled from outside the body. Such a device would make it much easier to deliver healing forces exactly where they are needed, whether deep inside a muscle, on the liver, or on the heart. It would also open up new ways to treat injuries, help patients recover faster, and maybe even change how we think about physical therapy and rehabilitation.
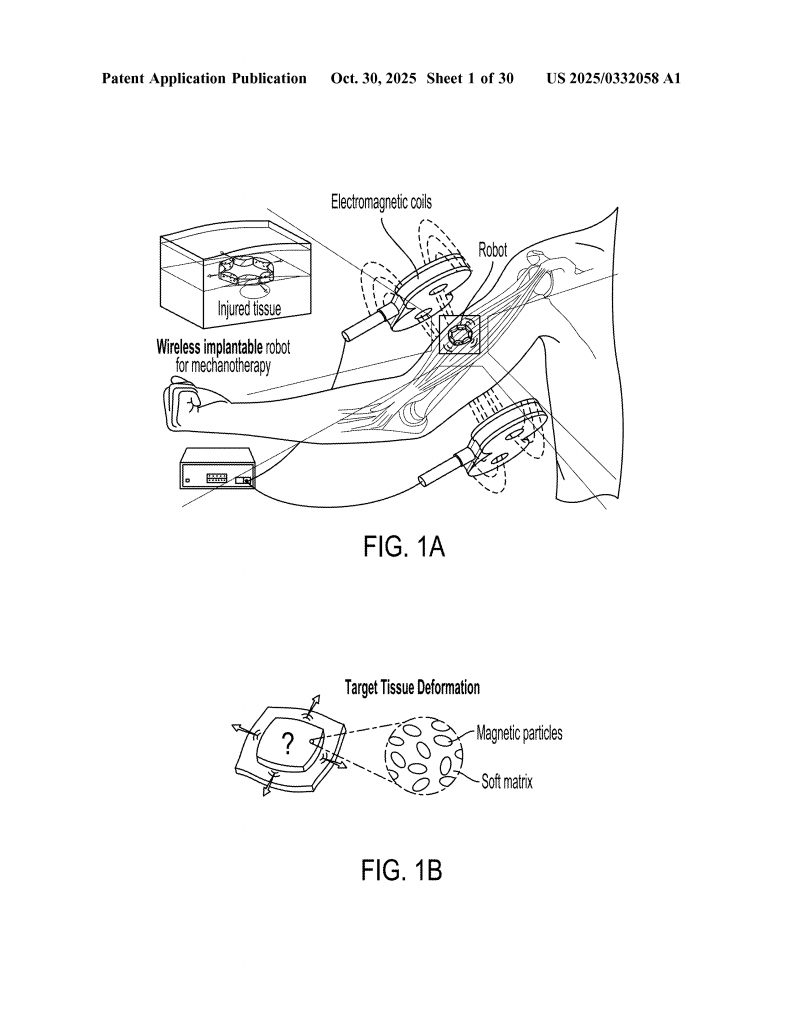
This is where the new patent comes in. The inventors have designed a soft robot—made from safe, flexible materials and embedded with tiny magnets—that can be controlled wirelessly using an external magnet. This robot can be programmed to move in different ways: it can stretch, compress, or shear tissue, all without wires or bulky equipment. It is safe for use inside the body, and it can be made in different shapes and sizes to fit many needs. This invention has the potential to revolutionize the way we treat injuries and promote healing.
Scientific Rationale and Prior Art
To understand why this invention is special, let’s look at how it builds on and goes far beyond what came before. Mechanotherapy is not new, but past solutions fell short in key ways. Here’s the science behind the invention, and how it improves upon old technology.
First, scientists have long known that cells “feel” and respond to mechanical forces. When you stretch or compress tissue, it changes the way cells behave. This can kickstart healing, reduce swelling, and even affect the immune system. But to get the best effects, the force has to be just right—and applied in the right way, at the right spot, for the right amount of time. That’s very hard to do with big, clunky machines.
Many early devices for mechanotherapy were either too simple (like massagers or compression sleeves) or too complex (like robot arms). More recently, some groups have tried to make soft devices that use smart materials, like gels that shrink with heat or wires that contract when electricity is passed through them. These showed promise, but they all had big limits:
- They needed wires to deliver power.
- They could not be controlled remotely.
- They were not always safe to use inside the body.
- They could not deliver precise, programmable movements to target tissues.
One clever idea was to use magnetism. By embedding magnets inside a soft material, you can move the device simply by applying a magnetic field from outside the body. This gets rid of wires and allows for remote control. But even here, early magnetic devices had issues:
- They could not move in complex ways—only simple bending or twisting.
- They could not be programmed for different motions or tailored for different tissues.
- They were not always made from biocompatible (safe for the body) materials.
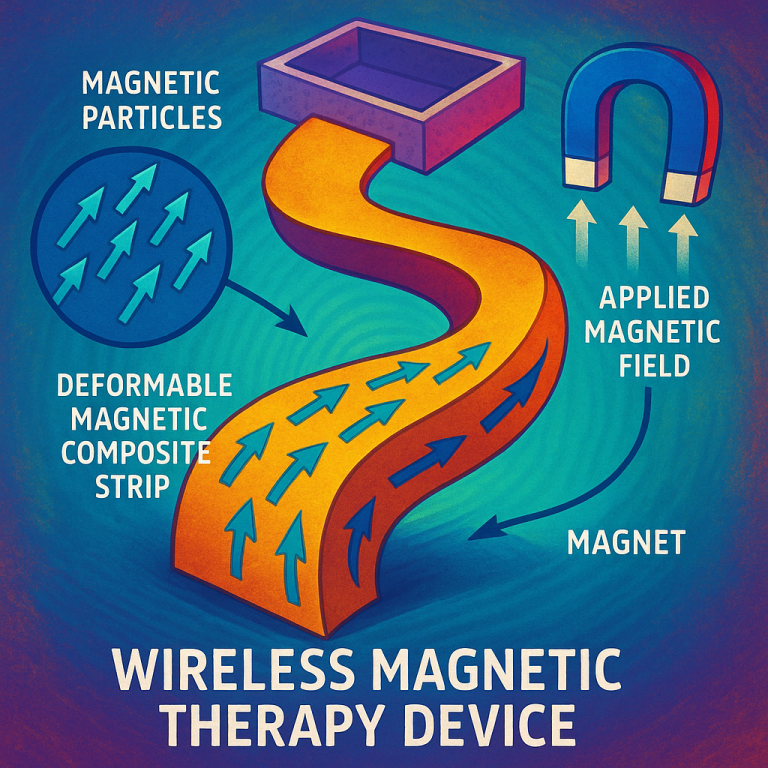
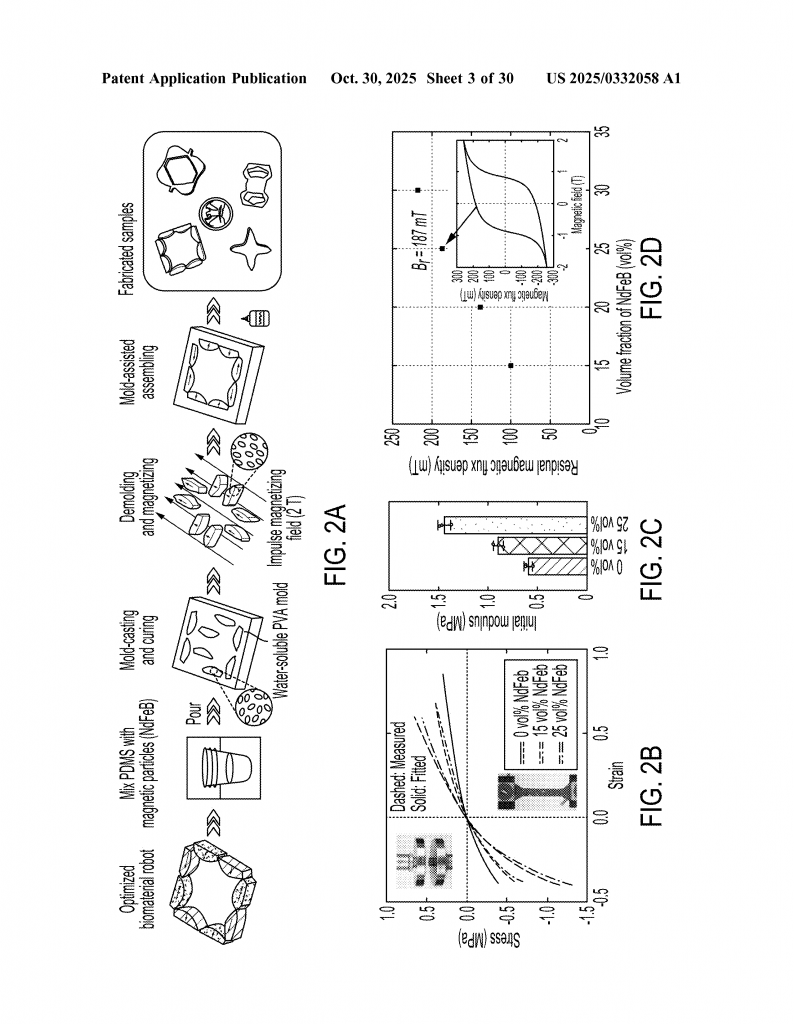
What makes this new invention stand out is how it uses both smart design and smart materials. The inventors use a process called “topology optimization,” which is a way to design the shape and magnetization of the robot so that it moves exactly as needed when a magnetic field is applied. They also use a soft, body-safe material (like PDMS or PBAT) mixed with strong, tiny magnets (NdFeB particles). This mix creates a “hard-magnetic soft material” that is flexible, strong, and can be made in lots of shapes and sizes.
They also worked hard to make sure the material is not harmful to cells or tissues. Tests showed that the material does not cause harm to cells, and mice implanted with the device did not have bad immune reactions. That means it is safe for use in or on the body.
Finally, the inventors made sure their device could be made using simple, low-cost manufacturing steps—like 3D printing a mold, mixing the material, and magnetizing the parts. This means the device can be produced for real-world use, not just in the lab.
In short, this invention takes the best parts of earlier ideas—wireless control, programmable motion, and soft, safe materials—and puts them together in a new way that solves the main problems faced by previous devices.
Invention Description and Key Innovations
Now, let’s look closely at how this invention works, what it is made of, and why it is truly new and useful.
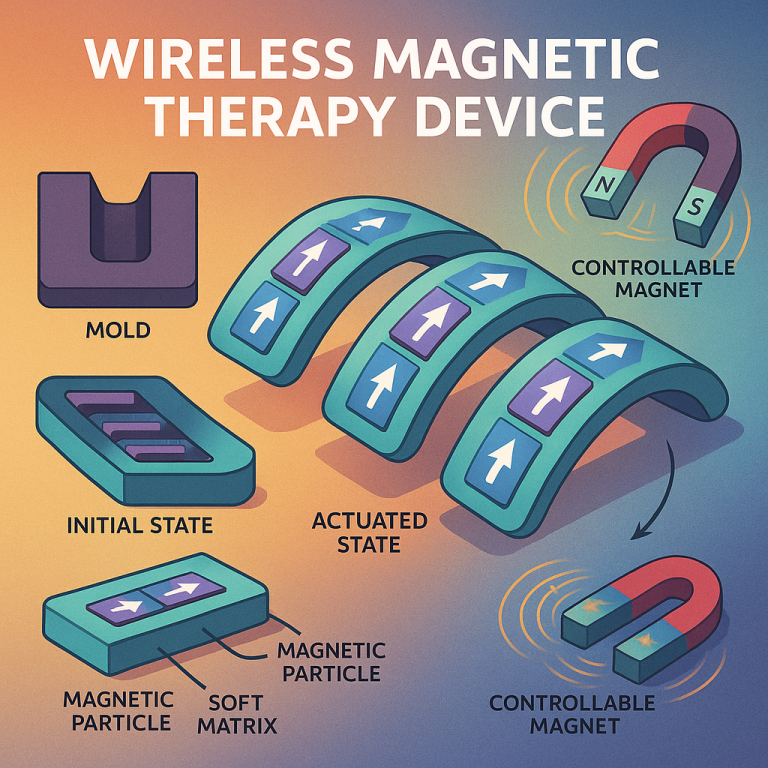
The core of the invention is a device made from several tiny pieces called “composite elements.” Each element is made from a soft, rubbery material (like PDMS or PBAT) and filled with small, powerful magnetic particles (NdFeB). These particles are arranged so that each element has its own “magnetic domain” pointing in a certain direction. This means that, when a magnetic field is applied, each element will want to move or rotate in a specific way.
The device starts in an “initial state,” which means its normal, resting shape. When you turn on the magnetic field (using an external magnet or a special coil), the device changes its shape—it might stretch, compress, or twist—depending on how the elements are arranged and magnetized. When you turn the field off, it goes back to its original shape. This allows for gentle, repeatable movement that can be programmed for many different tasks.
The device can be made in many shapes and sizes. For example, it can be a flat patch to go on a muscle, a small block to go inside the liver, or even a shape that fits around the heart. The inventors showed that the device can be made as small as a few millimeters or as large as needed. The key is that it remains soft, flexible, and safe for the tissue it touches.
Let’s break down the steps of making and using the device:
- First, the desired movement (stretch, compress, shear) is chosen based on the tissue and the therapy needed.
- A computer model is used to design the shape and magnetization of the device so it will move in the right way when a magnetic field is applied. This is where “topology optimization” comes in—it helps find the best design for the job.
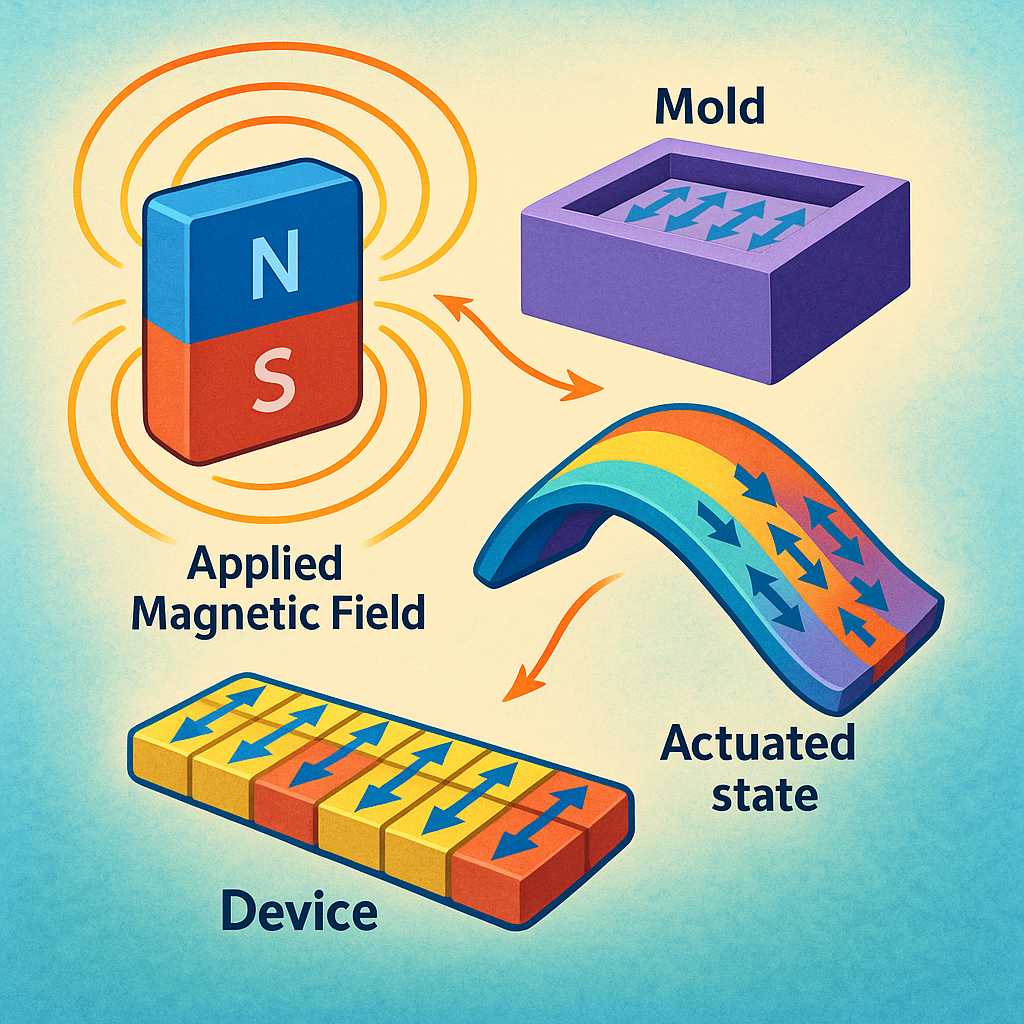
- A mold is made, often using a 3D printer, to match the shape designed by the computer.
- The soft material and magnetic particles are mixed and poured into the mold. The mixture is then cured (hardened) at a safe temperature.
- Once cured, the different elements are magnetized in specific directions using a strong magnetic field. This gives each part its own “magnetic domain.”
- The elements are joined together (if needed) and the finished device is ready to use.
- To use the device, it is placed on or inside the target tissue. It can be attached using safe glues, medical adhesives, or even sutures. Then, an external magnet or electromagnetic coil is used to control the device wirelessly—making it move, stretch, compress, or twist the tissue as needed.
Here are the key innovations and benefits of this invention:
- Wireless and Remote Control: The device can be moved simply by applying a magnetic field from outside the body. No wires, no batteries, no surgery to remove it later.
- Programmable, Precise Movements: By designing the shape and magnetization carefully, the device can be made to deliver exactly the right kind of force—stretching, compressing, shearing, or even two modes at once.
- Safe, Biocompatible Materials: The use of soft, body-safe materials means the device won’t harm tissues, and animal tests show it does not cause a bad immune response.
- Customizable for Any Tissue: The device can be made in any shape or size, to match the needs of muscles, liver, heart, or other organs. The design process takes into account the specific properties of each tissue, so the movement is gentle and effective.
- Long-Lasting and Durable: Tests show the device can move and return to its original shape over many cycles, without wearing out or losing strength.
- Simple, Scalable Manufacturing: The device can be made using standard, low-cost manufacturing steps. It can be scaled up for mass production or made in custom shapes for special needs.
- Real-Time, Adjustable Therapy: The strength and speed of the movement can be changed simply by adjusting the magnetic field. This allows doctors to fine-tune the therapy for each patient.
The inventors demonstrated the device in tests on pig tissues (muscle, liver, heart), showing that it could deliver strong, repeatable movements—just as designed by the computer model. They also showed that the device works just as well after many cycles, and that it can be controlled accurately and safely.
Perhaps most exciting, the device opens new doors for research and therapy. It could be used to study how cells respond to different types of mechanical forces, to speed up healing after injury, or to deliver physical therapy to tissues deep inside the body without surgery. In the future, it might even be possible to combine the device with smart sensors to monitor healing in real time, or to use it to deliver drugs or other treatments right where they are needed.
Why This Invention Matters
This invention is not just a new gadget; it is a whole new way of thinking about how to heal and support the body. By making it easy to deliver controlled, gentle movement to tissues anywhere in the body, it removes many of the barriers that have held back mechanotherapy. It is safe, easy to use, and flexible enough to fit many needs. It is the first step toward a future where healing can be delivered wirelessly, precisely, and comfortably—right where it is needed most.
Conclusion
The wireless magneto-active soft robot described in this patent is a leap forward in medical technology. It solves the main problems faced by earlier devices for tissue healing and mechanotherapy: it is soft, safe, wireless, programmable, and easy to make. The device uses smart design and materials to deliver gentle, controlled forces to tissues, helping them heal faster and better. It can be made in any shape or size, tailored for the needs of each patient and each tissue. With its wireless control, it can be used deep inside the body, without wires or surgery, and adjusted in real time to give exactly the right therapy. This invention opens new opportunities for doctors, therapists, and researchers—and most importantly, for patients who need safe, effective ways to recover from injury and disease. The future of healing is soft, smart, and wireless—and it starts here.
Click here https://ppubs.uspto.gov/pubwebapp/ and search 20250332058.