VALIDATING VEHICLE SENSOR CALIBRATION
Invented by Zhang; Lei, Jiang; Li, Platinsky; Lukas, Shaban; Karim Tarek Mahmoud Elsayed Ahmed
Sensors are everywhere in cars today, especially in vehicles that drive themselves or collect lots of data. But how do you make sure these sensors are always working together the right way? Today, we’re breaking down a new patent application that shows a smart method for checking and fixing the calibration of sensors on a moving vehicle. Let’s explore how this technology works, why it matters, and how it’s different from older ways of doing the same job.
Background and Market Context
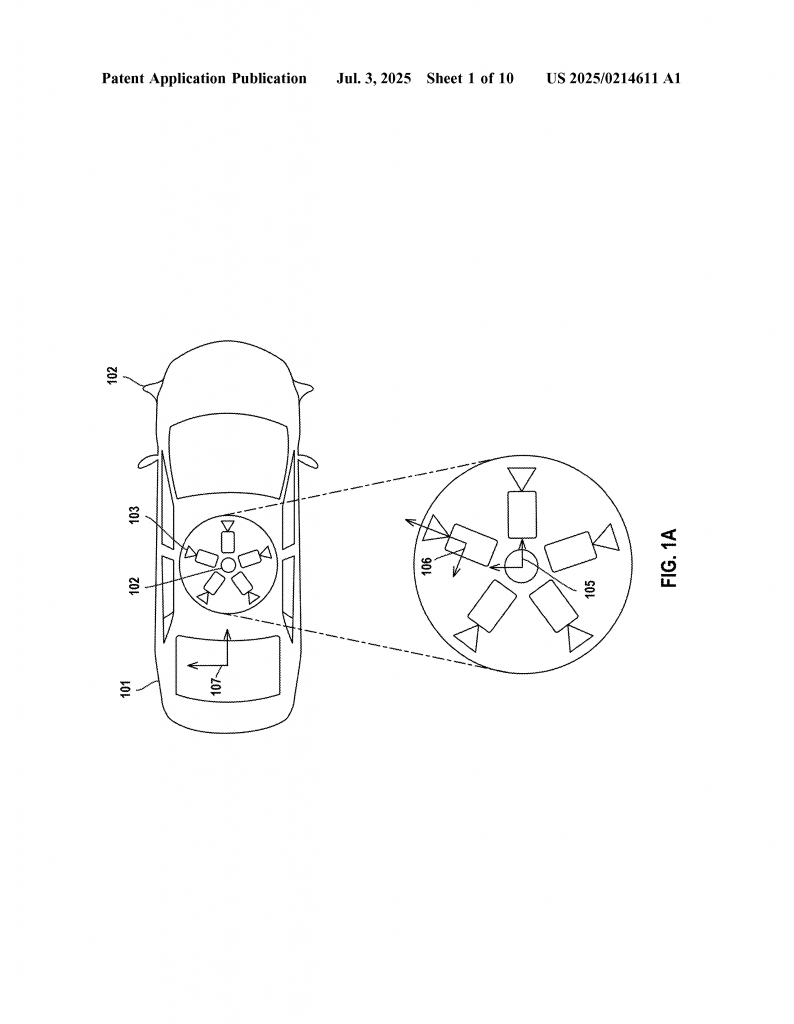
Cars have changed a lot in recent years. Now, many vehicles come loaded with cameras, LiDAR, GPS, radar, and even more sensors. These sensors help with everything from simple navigation to advanced tasks like self-driving and building maps of the world. In simple terms, each sensor “sees” the world in its own way. For a car to understand where it is and what’s around it, all these sensors need to work together, and their data must fit together like puzzle pieces.
The challenge is that sensors can stop lining up correctly over time. If you hit a pothole, have a fender-bender, or even just drive for a long time, a sensor might move a little bit out of place. Even a small nudge can make the data from that sensor less useful or even dangerous if the car is driving itself. This is why calibration, or making sure every sensor’s view matches up with the others, is so important.
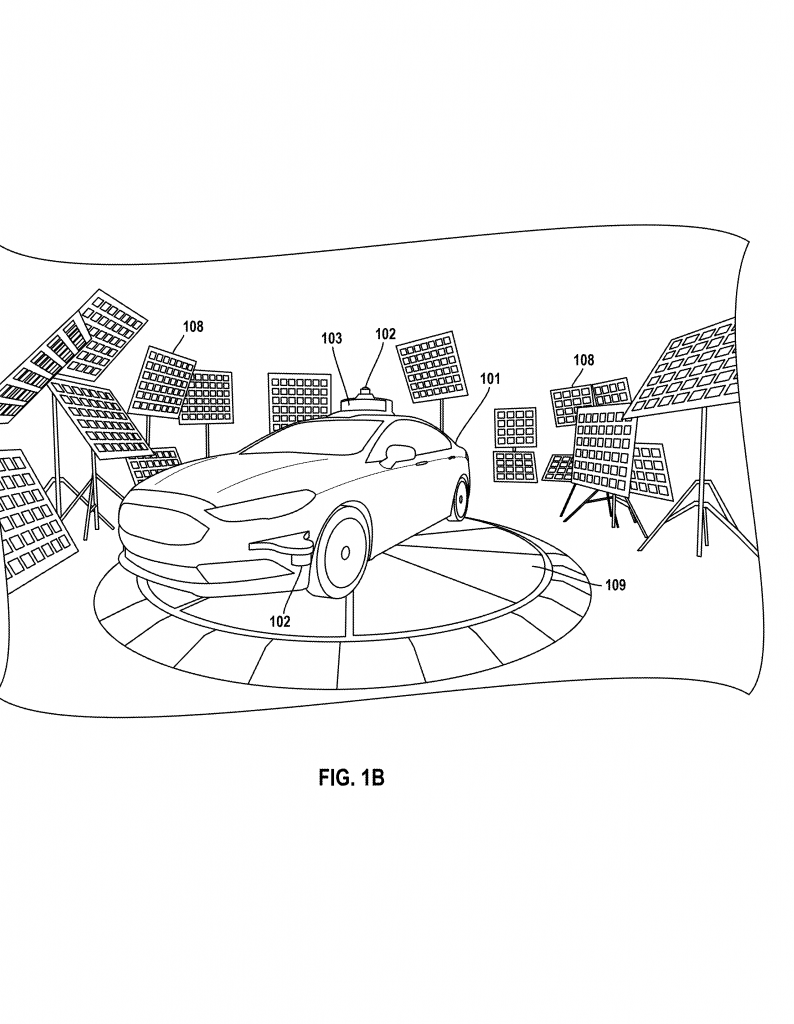
Traditionally, calibration is done in a factory or a workshop with special tools. The car is placed in a controlled space, surrounded by targets like checkerboard patterns. Sensors capture data as the car is rotated or moved, and computers figure out exactly where each sensor is located on the car. This process is accurate but slow, expensive, and hard to repeat once the car is out on the road.
With more cars collecting data and driving themselves, the need for easy, automatic, and reliable calibration has become urgent. Companies want their vehicles to check calibration on their own, without stopping or going to a shop. This means the car needs a way to look at its own sensor data and figure out if anything has changed. If it finds a problem, the car should either fix it or warn the driver right away.
This new patent application addresses the need for a better solution. It describes a method for vehicles to validate and, if necessary, recalibrate sensor positions using the data they already collect as they drive. By making calibration a part of everyday driving, this invention aims to keep vehicles safer, maps more accurate, and systems more reliable, all while saving time and money.
Scientific Rationale and Prior Art
To understand what makes this invention special, let’s look at how calibration has usually worked and the science behind aligning sensor data.
First, every sensor on a car has two types of important settings. One is “intrinsic,” meaning the details inside the sensor itself, like a camera’s lens or a LiDAR’s scanning pattern. These are mostly fixed by the factory. The other is “extrinsic,” which means where the sensor is on the car and how it’s angled compared to the rest of the vehicle. If you move the sensor, the extrinsics change.
For sensors to work together, you need to know both the intrinsic and extrinsic values. If you get these wrong, the car might think an object is in the wrong place, or it might not “see” something at all. This is very risky for safety.
Older methods for checking or fixing extrinsic calibration almost always need special environments and tools. The car is parked in a spot with known targets, and the sensors measure those targets from different angles. Then, with powerful computers, you figure out the exact position and angle of each sensor. This process can be slow, needs trained workers, and is hard to do once a car leaves the factory.
There are some methods that try to do calibration “online,” meaning while the car is in use. Some of these use maps that the car already has, matching what the sensor sees to the map. Others use the way the car moves (called odometry), comparing how different sensors see the same motion. But these approaches have problems too. Map-based methods need very good maps, and odometry-based methods can drift over time or need complex driving maneuvers to work well.
For example, if you’re using odometry and just drive straight, you might not notice if a camera is rotated slightly. You need to drive in ways that make the errors show up — turning, going over bumps, and so on. Even then, if an error builds up slowly, it can be hard to spot.
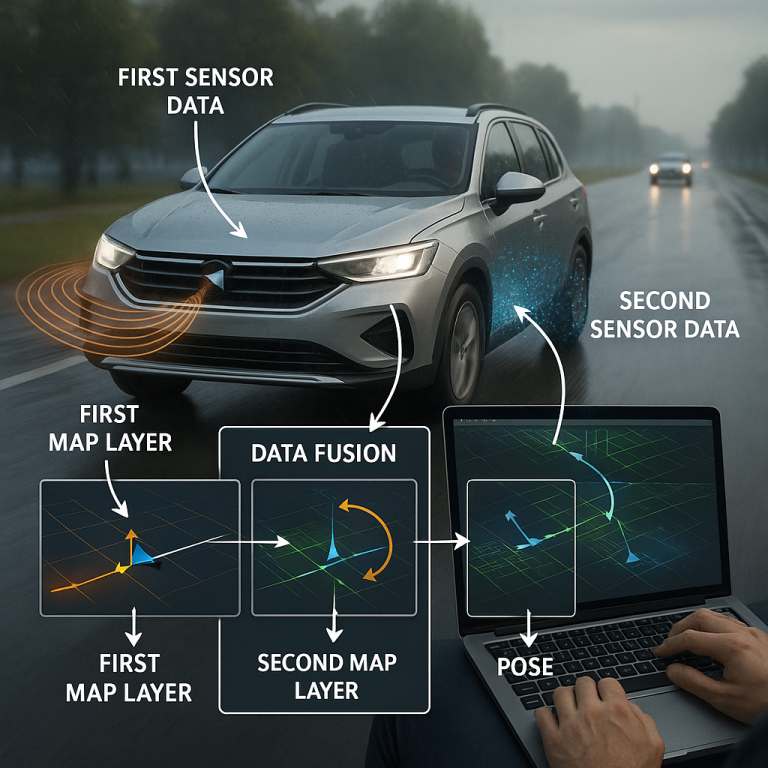
Some newer research combines different types of data, or “fuses” them, to get better results. But still, most systems are either too slow, too unreliable, or need too much human help. There is also a risk that errors from one sensor can spread to others if the calibration isn’t checked often.
The patent application we’re discussing builds on these ideas but adds something new. It offers a way to use both map-based and odometry-based techniques, together or separately, to check and fix calibration on the fly. It also describes how to handle changes: the car can either update its calibration automatically, warn the driver, or even pull over if something is seriously wrong.
By making calibration part of the vehicle’s regular operation, this invention can catch problems early, keep sensor data accurate, and avoid dangerous mistakes. It works with many types of sensors, like cameras, LiDAR, radar, and IMUs, and can even run when the car is standing still or moving. This flexibility is a big leap forward compared to older approaches.
Invention Description and Key Innovations
Now, let’s dig into how this new method works and what makes it stand out.
At the heart of the invention is a simple but clever idea: use the data your car is already collecting to figure out if your sensors are still in the right place. If they’re not, the system can fix the calibration or take action to keep the car safe.
Here’s how the patented process works in plain language:
1. The car collects data from two or more sensors during regular driving. These could be a camera and a LiDAR, a camera and an IMU, or any other pair.
2. For each sensor, the system figures out how the car has moved over time — this is called a “trajectory.” For example, the LiDAR might show how the car turned and moved forward, while the camera or IMU gives another view of that same motion.
3. These trajectories are calculated in each sensor’s own frame of reference — their own “coordinate system.” They may not line up at first because the sensors are in different places on the car.
4. The system uses an optimization method (like least squares) to align the two trajectories. It tries out different possible translations (shifts) and rotations (turns) between the sensors until the movements line up as closely as possible.
5. Once the best fit is found, the system knows the exact translation and rotation between the sensors — this is the calibration.
6. The system then checks if this calibration matches what it saw before (from the factory or from the last check). If nothing has changed, everything is fine. If something is different, the system decides what to do:
– If the change is small, it might just update the calibration automatically.
– If the change is bigger, it could warn the driver or log the problem.
– If there’s a big problem, it could tell the car to stop or pull over.
7. The whole process can use just the vehicle’s own data, map data, or both. In some cases, if a good map exists, the car can use it to help line up sensor data. If not, the odometry approach works even without a map.
8. This method works with many types of sensors: cameras, LiDAR, radar, sonar, and IMUs. It can be used while the car is moving or even while parked, as long as there’s enough data for the system to work.
Some special features of the invention include:
– The ability to run calibration checks as often as needed, even on every sensor frame, to catch problems quickly.
– Combining different approaches (map-based and odometry-based) for better accuracy.
– Using constraints, like making sure the same transformation applies at every time step, to improve results.
– Handling complex driving paths that make it easier to spot calibration errors.
– Giving the car flexibility to decide what action to take if calibration changes, from updating settings to notifying drivers or stopping the car.
The patent also describes how this method can be used in larger systems, like ride-hailing networks or fleets of vehicles, where keeping all cars calibrated is critical for safety and map quality. The method doesn’t need special hardware or expensive tools, just smart software running on the vehicle’s computer.
By making sensor calibration a regular, automatic part of vehicle operation, this invention promises to improve the safety, reliability, and usefulness of modern cars, especially those that drive themselves or collect data for building maps. It also lowers costs and makes it easier to manage large fleets of sensor-equipped vehicles.
Conclusion
Sensor calibration is a key part of keeping today’s vehicles safe and smart. This patent application introduces a method that lets vehicles check and fix their sensor calibration automatically, using the data they already collect as they drive. By combining map-based and odometry-based techniques, and by letting the system decide what action to take when problems are found, this approach sets a new standard for reliability and ease of use.
In a world where cars are becoming more like rolling computers, making sure their sensors work together perfectly isn’t just a technical challenge — it’s a safety issue. This invention offers a clear, actionable way for automakers, technology companies, and fleet operators to keep their vehicles in top shape, with less downtime and lower costs. As more vehicles rely on accurate sensor data for navigation, safety, and mapping, solutions like this will become even more important.
If you work with autonomous vehicles, sensor systems, or fleet management, understanding and applying these ideas can help keep your technology ahead of the curve and your users safe on the road.
Click here https://ppubs.uspto.gov/pubwebapp/ and search 20250214611.